Dem Projekt VABENE++ stehen Entwicklungen aus dem vorherigen Projekt VABENE (2010-2013) zur Verfügung, die in Zukunft zunehmend operationalisiert und erweitert werden. Diese Entwicklungen wurden bereits operationell eingesetzt und in diversen Demonstrationen erfolgreich getestet.
Lageerfassung in Echtzeit
Das 3K Kamerasystem nimmt hochaufgelöste Luftbilder auf, die unmittelbar nach der Aufnahme und noch während des Fluges automatisch weiterverarbeitet werden. Mit Hilfe der aktuellen Positions- und Lageinformationen der Kameras, sowie einem Geländemodell werden die Daten an Bord georeferenziert und orthorektifiziert und können im Anschluss per Datenlink direkt zur Bodenstation übertragen werden. Dort lassen sich die Luftbilder in Geoinformationssysteme und Webservices einbinden, um einen aktuellen Überblick über das Untersuchungsgebiet zu ermöglichen.
Echtzeitfähige Verkehrsdatenextraktion aus Luftbildern
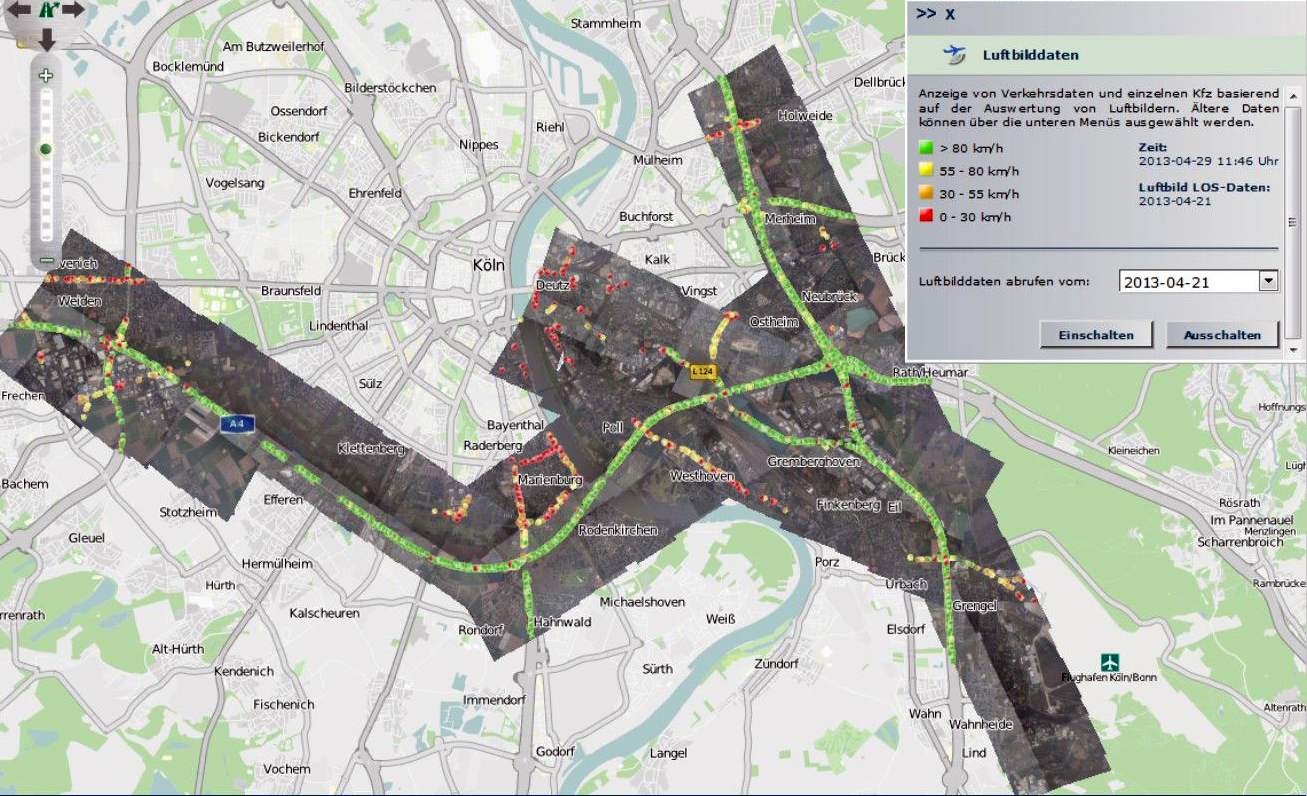
Im Fall von Großereignissen und Katastrophen sind Hilfskräfte auf aktuelle und zuverlässige Verkehrsdaten angewiesen, die oft nur für Hauptverkehrswege verfügbar sind. Daher werden am DLR Algorithmen entwickelt, die aus einer Sequenz von Luftbildern automatisch und in Echtzeit diese Verkehrsdaten ableiten. Um die Fahrzeuge zu detektieren, werden Maschinen-Lern-Algorithmen, wie z.B. adaptive boosting, sowie Support Vector Machines genutzt. Vor der Befliegung werden die Algorithmen auf die Erkennung von Fahrzeugen aus Luftbildern trainiert und führen anschließend während des Fluges eine Klassifikation auf den neu aufgenommenen Luftbildern durch. Anhand von Form und Farbe der Fahrzeuge können diese in mehreren Bildern wiedererkannt und somit auch ihre Geschwindigkeit gemessen werden. Die Verfahren der Verkehrsdatenextraktion aus Luftbildern liefern bei einer Flughöhe von 1000m über Grund Ergebnisse mit vergleichbarer Qualität zu bodengebundenen Sensoren.
Nahe-Echtzeit Verkehrsdatenextraktion aus luftgestützten Radardaten
Fahrzeuge werden mit dem flugzeuggetragenen Radar mehrere Sekunden lang beobachtet. Aufgrund des Doppler-Effekts (= Veränderung der Frequenz von Radarsignalen, wenn sich der Abstand zwischen Radar und beobachteten Objekt verändert) erscheinen sie im Radarbild im Allgemeinen jedoch nicht an deren tatsächlichen Positionen auf der Straße, sondern um bis zu mehrere hundert Meter versetzt davon. Darüber hinaus sind sie oftmals mit freiem Auge nicht erkennbar, da sie von der viel heller erscheinenden Umgebung überlagert werden. Mit speziellen Signalverarbeitungsalgorithmen lässt sich die helle Umgebung unterdrücken, so dass eine Erkennung und Detektion der Fahrzeuge dennoch möglich ist. Auch die tatsächlichen Positionen, Geschwindigkeiten und Fahrtrichtungen der versetzt abgebildeten Fahrzeuge lassen sich mit hoher Genauigkeit ermitteln. Voraussetzung hierfür ist ein leistungsfähiges Radarsystem mit mehreren in Flugrichtung angeordneten Empfangsantennen, wie dies bei F-SAR und V-SAR der Fall ist.
Klassifikation von Freiflächen und Bereitstellungsräumen
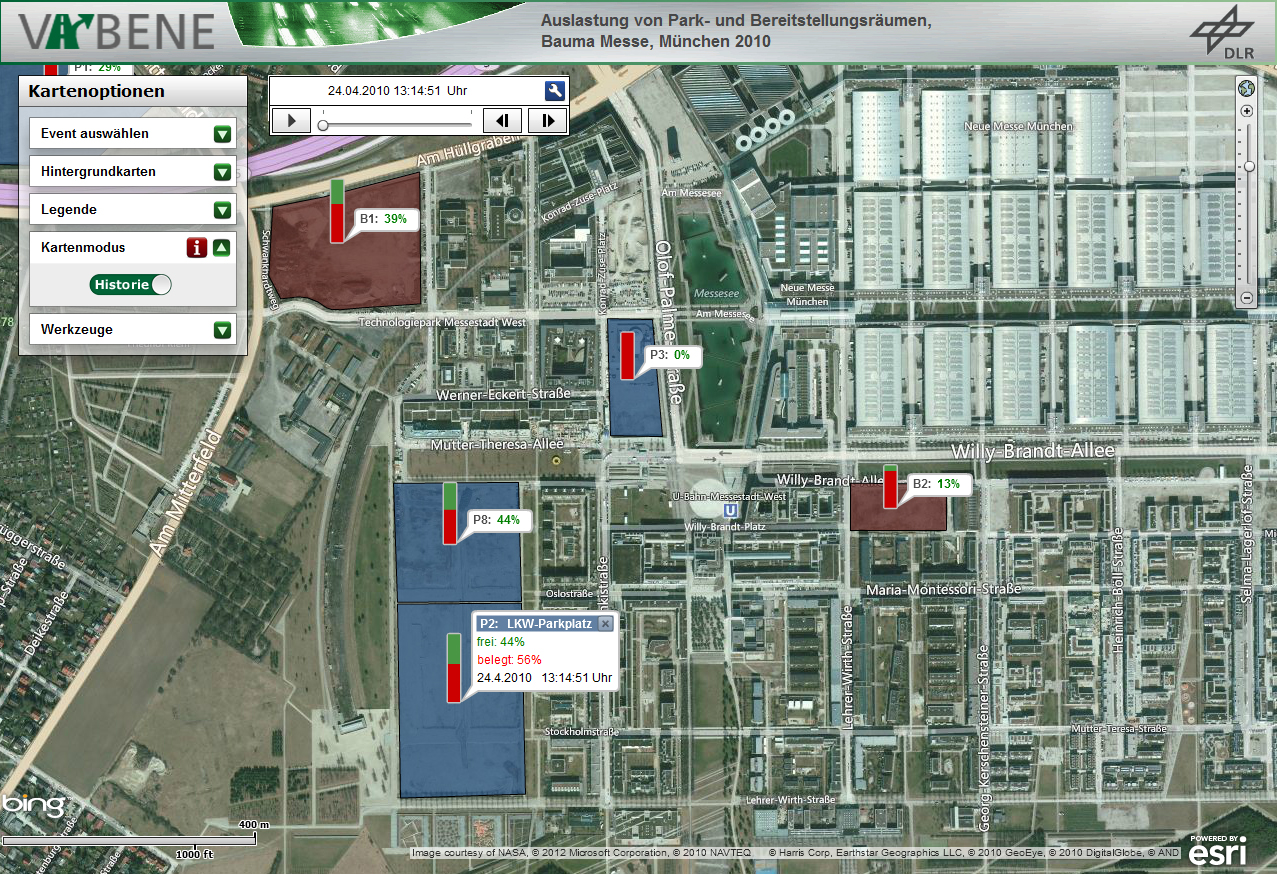
In VABENE wurde ein interaktives, semiautomatisches und generisches Klassifikationsverfahren zur Ausweisung von betroffenen Flächen und Infrastrukturen, sowie zur Bewertung von Freiflächen, d.h. Bereitstellungsräumen für BOS-Kräfte und Parkflächen entwickelt. Neben der Verwendung von klassischen Kartenprodukten wurde zusätzlich ein webbasierter Workflow erarbeitet, welcher eine interaktive Visualisierung der aus Luftbildern gewonnenen Informationen zur Freiflächenbelegung in Nahe-Echtzeit gewährleitet. Dieser Service steht über das ZKI-Portal zur Verfügung.
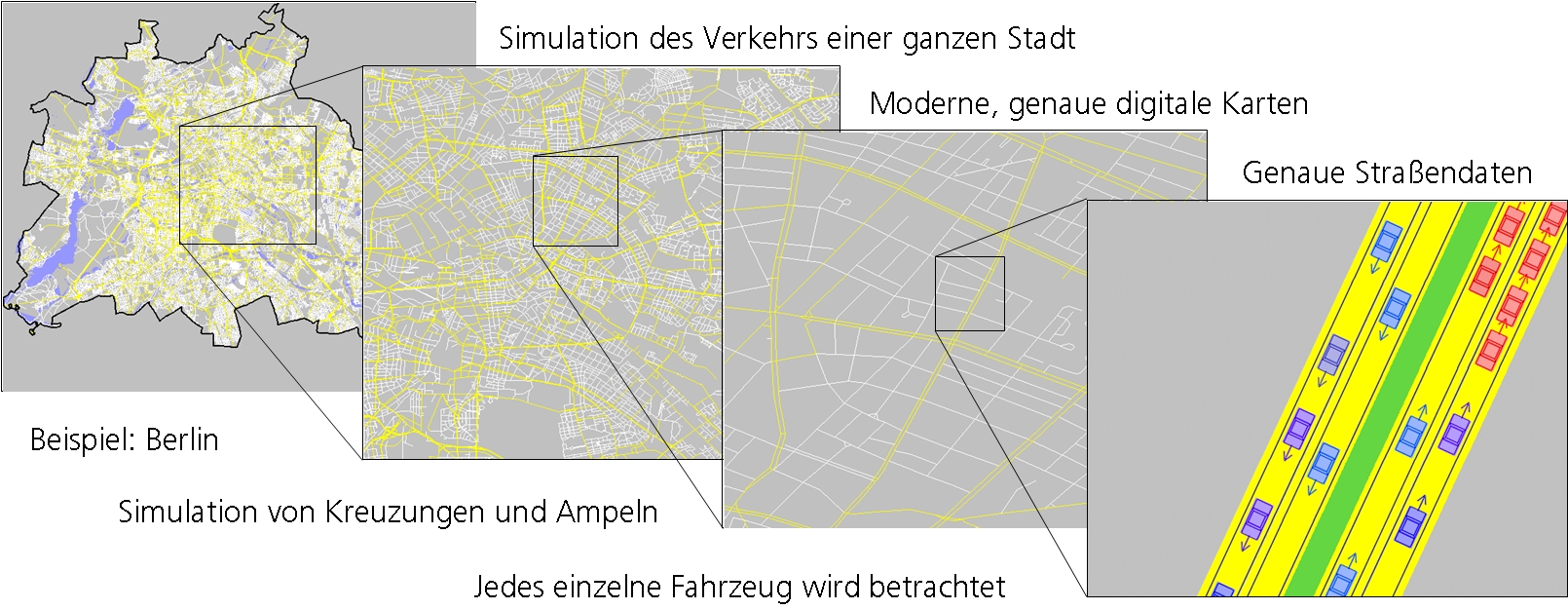
Modellierung/Simulation
Die Open-Source Simulationssoftware SUMO bildet den Straßenverkehr virtuell ab und bezieht dabei auch Verkehrsnachfrage und Verkehrssteuerungsinfrastruktur ein. Es entsteht eine Abbildung realer Situationen und Gegebenheiten in der Simulation, die sowohl Autobahnen als auch Stadtstraßen berücksichtigt. Damit können beispielsweise die Qualität von Steuerungsverfahren objektiv bewertet oder neue Verfahren zur Datenfusion getestet werden.
Im Onlinebetrieb können aktuelle Messwerte realer Sensoren integriert werden, um die Entwicklung des Verkehrs in Echtzeit zu prognostizieren. Durch Änderung der Verkehrsnachfrage oder ˗infrastruktur bzw. über die Nachbildung von Verkehrsmanagementmaßnahmen in der Simulation können Verkehrssituationen Szenarien-basiert analysiert und Maßnahmen zur Steuerung und Beeinflussung (bspw. Sperrungen und Umleitungen) optimiert werden.
Die Wegstrecken in der Simulation können aus Etappen zusammengesetzt sein, die jeweils mit einem anderen Verkehrsmittel zurückgelegt werden. Auf diese Weise kann auch die Modellierung des Öffentlichen Verkehrs konsistent integriert werden. Außerdem ermöglicht diese multimodale Abbildung die Beantwortung von Fragestellungen, die sich aus der gemeinsamen Nutzung des Straßenraums durch verschiedene Verkehrsträger ergeben.
Verkehrsmanagementmaßnahmen und die Steuerung des Verkehrsflusses durch Lichtsignalanlagen können in SUMO interaktive mit Hilfe einer programmierbaren Schnittstelle (TraCI) angepasst werden. Darüber hinaus eignet sich SUMO zur Modellierung des Kommunikationsaustausches zwischen Fahrzeugen und der Verkehrsinfrastruktur (C2C und C2X) oder zur Nachbildung des Schadstoffausstoßes des Straßenverkehrs.
Links
- Sensorverbund zur Lagebildunterstützung in Nahe-Echtzeit anlässlich des Landesfeuerwehrtags Baden-Württemberg 2013
- DLR erstellt hochaufgelöste Luftbilder aus den Hochwasserregionen
- Das wasserstoffbetriebene Motorsegelflugzeug Antares im Einsatz für die Lageerfassung bei Großveranstaltungen und zur Katastrophenhilfe
- Einsatz auf Zypern
- Simulation of Urban Mobility
- Projekt iTetris