


In crisis situations, it is important to have a quick and detailed picture of the situation, which often also includes areas that are difficult to access. Multicopters are particularly suitable for this application, as they are easy to transport and very flexible. Equipped with cameras and simple navigation systems, they become small flying robots that can photograph the terrain and send this information directly to their pilot by radio. However, the range of these systems is limited, so that it takes a lot of time and personnel to cover larger areas. For this reason, the transport research project VABENE++ is working on a software solution for a flight robot swarm, which enables a fast and efficient recording of larger areas and provides the collected information immediately.
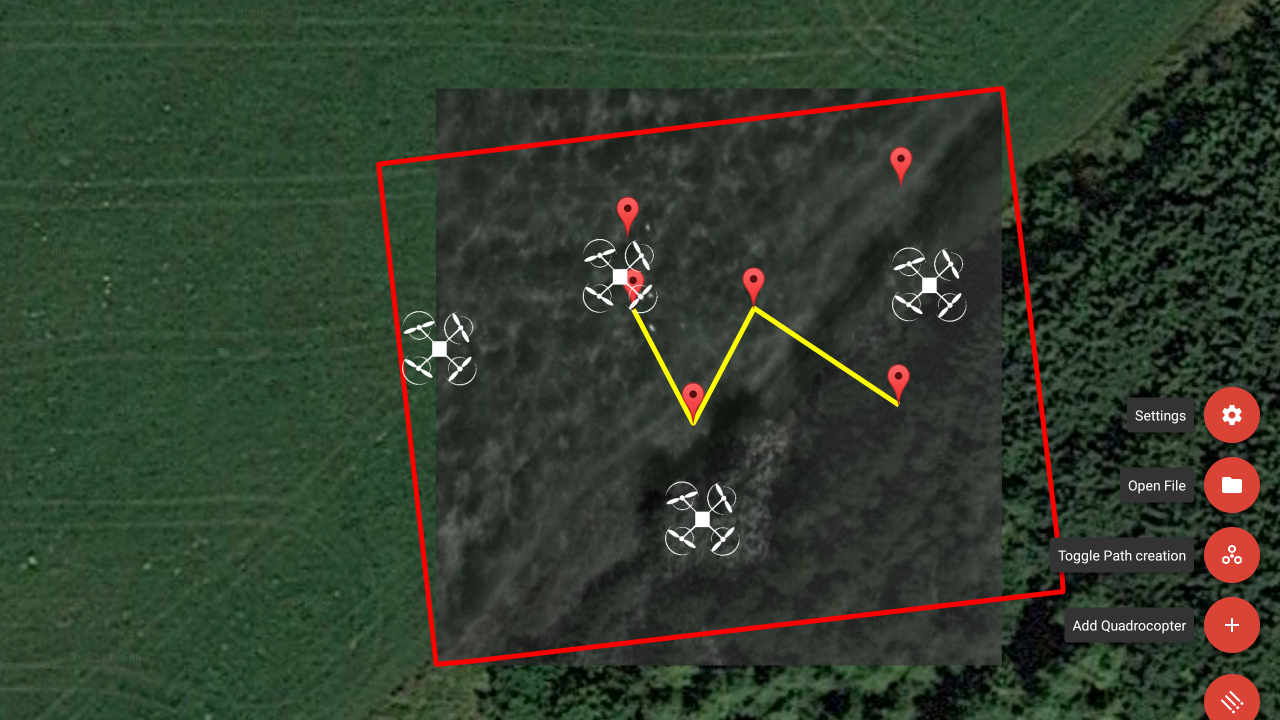
The Swarmtool is an Android-based app for decentralized control of flight robots and at the same time enables comprehensive data access within the network. This network can contain several teams in addition to the command and control team, each of which controls a swarm of flying robots via the tool. A team can consist of several, but sometimes only one person who coordinates a swarm on their own. The collected information of the individual flying robots is shared via the Swarmtool and is immediately available to the team members as well as the operations management. Nature-inspired swarming algorithms, also known as flocking algorithms, are used for this purpose. In addition to the fast location detection of larger areas, the main advantages are the efficient management of the swarm and the direct transfer of information.
Flight tests are currently being conducted at a test site near Starnberg. In the future, the tool will also be tested in connection with the Wildretter project.