

In the project VABENE++, the Remote Sensing Technology Institute developed and operationally tested an automated processing chain for capturing traffic data from aerial photography sequences of the 3K and 4k camera systems. As this processing chain detects moving and not moving vehicles, it was previously not possible to separate parked vehicles from waiting vehicles. This was a problem especially in the inner-city area, where there are a lot of vehicles parked along road, but also at the same time there are a lot of vehicles waiting at the moment of the overflight, e. g. in front of traffic lights.
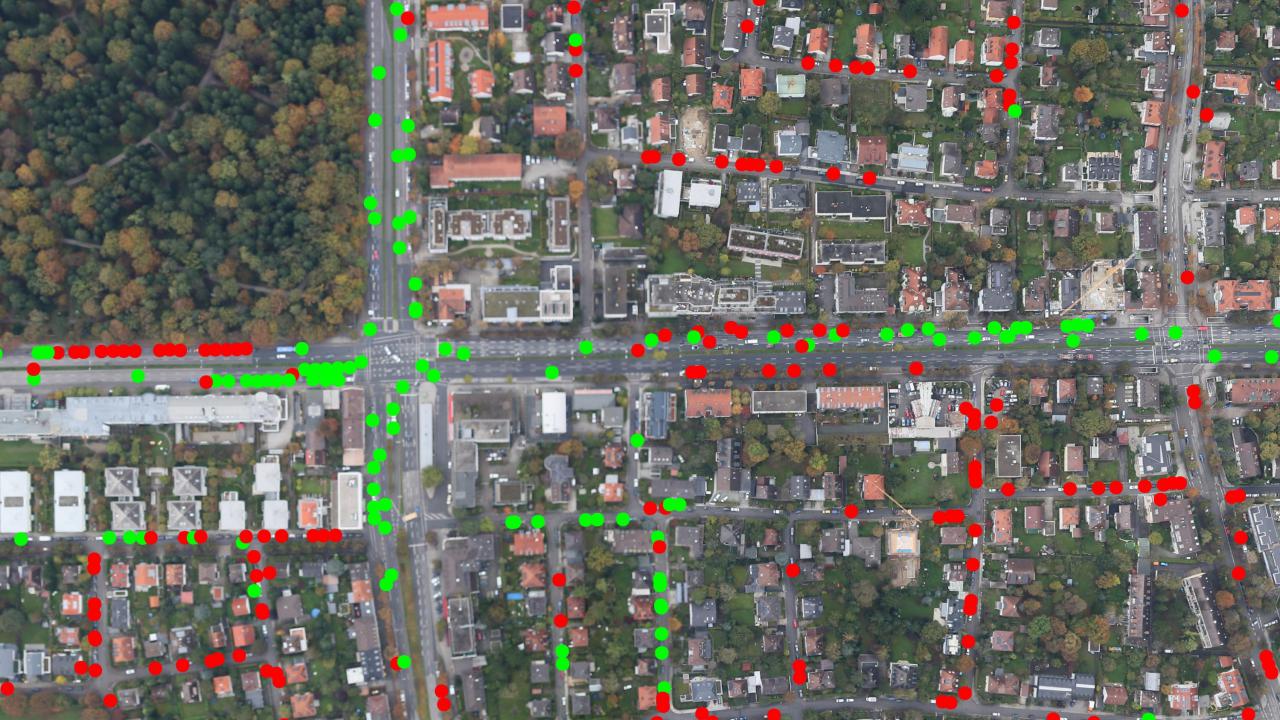
A method has now been developed to carry out precisely this separation between parking and waiting vehicles at the time of the image aqcquisition. Delauney triangulation is performed between the individual vehicle positions to detect different queues of parked and participating cars. In addition, parallelism to the roads from Navteq or Open Street Map data is assumed as a condition for linking the individual vehicles. The resulting neighborhood relationship between the individual vehicles is combined to form vehicle queues that are accurate to the lane. By means of a sophisticated fuzzy logic, the track-accurate vehicle queues are then classified into parking or participating in traffic in the next step. The classification result achieves a accuracy of 85%-90% in relation to the previous vehicle detection.
The new method will be integrated into the operational process chain for automatic traffic classification of the 3K and 4k systems and will be used for future campaigns.