The VABENE++ project has access to the results of the prior VABENE project (2010-2013) and will be increasingly implementing and expanding those developments. The applications described below are already in operational use, having been successfully tested and demonstrated in diverse instances.
Real-Time Situation Assessment
The 3K camera records high-resolution aerial images which are automatically processed already during the flight immediately after they enter the system. With the help of the precise momentary position and orientation of the cameras and a terrain model, the data are georeferenced and orthorectified on board before being directly transmitted to the ground station via a data link. There the aerial images can be incorporated in geoinformation systems and Web services so that an up-to-date overview of the area under study can be made generally available.
Real-time Traffic Data Extraction from Aerial Images
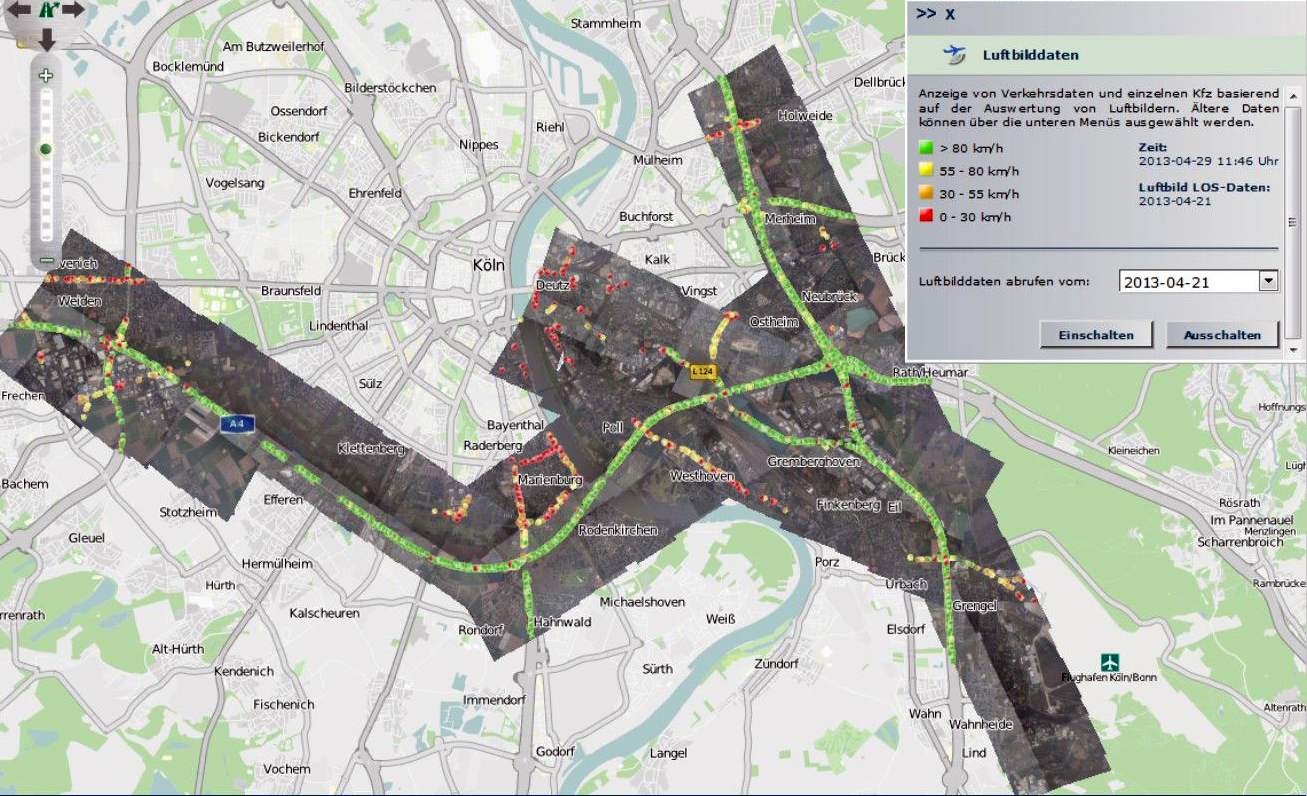
In cases of large public events and disaster situations rescue teams need current and reliable traffic information, which is often only available for main roads. DLR is therefore developing algorithms which automatically derive this traffic information from a sequence of aerial images in near-real-time. In order to detect moving vehicles, machine learning algorithms such as adaptive boosting, as well as support vector machines, are used. Algorithms trained before the flight to recognize vehicles in aerial images can then carry out a classification during the flight using the new aerial images as soon as they are recorded. Based on the shape and colour of the vehicles they can be identified and tracked in several successive images, which makes it possible to determine their velocity. At a flight altitude of 1000 m these methodologies for traffic data extraction from aerial images yield results of a quality comparable to ground-based sensors.
Near-Real-Time Traffic Data Extraction from Aerial Radar Data
Vehicles are monitored for several seconds by aerial radar. Because of the Doppler effect (the frequency shift of a radar signal which results from a change in the distance between the radar and the object under observation) they usually do not appear in the image at their actual positions on the road, but offset by as much as several hundred meters. In addition, they often cannot be seen by the naked eye in the radar image because they are masked by their much brighter surroundings. But these bright surroundings can be suppressed with special signal processing algorithms which make it possible to detect the vehicles. The actual positions, velocities and directions of movement of the offset vehicles can also be determined with high accuracy. The precondition is use of a powerful radar system with several receiving antennas facing in the flight direction, which is the case with F-SAR and V-SAR.
Classification of Open Spaces and Standby Areas
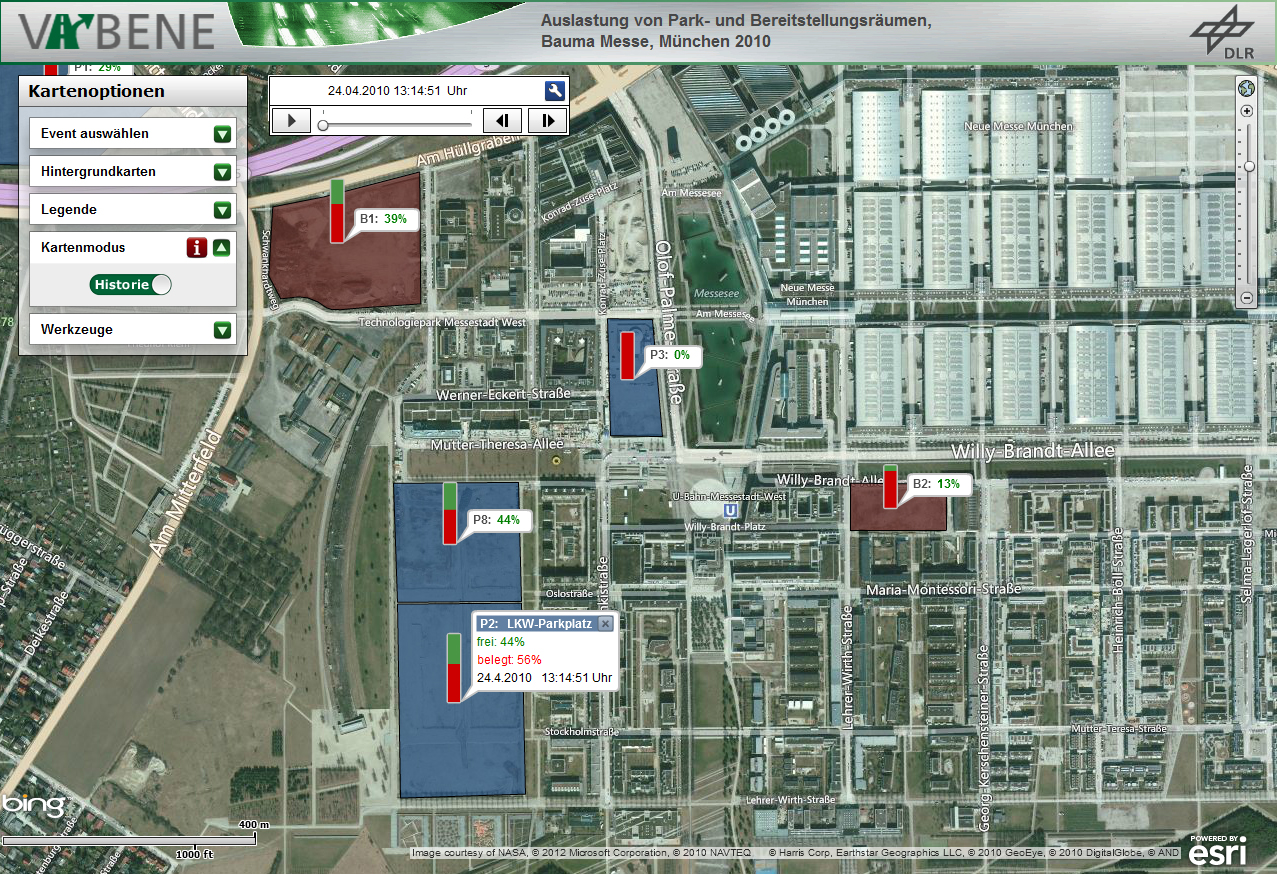
An interactive, semiautomatic and generic classification procedure was developed in the VABENE project to identify affected surfaces and infrastructure as well as to assess open areas for use as standby areas by public authorities and organisations with security responsibilities or as parking lots. In addition to employing traditional map products, a Web-based workflow was devised which produces an interactive near-real-time visualisation of the occupation of open spaces based on information gained from aerial images. This service is available via the portal of the Center for Satellite Based Crisis Information (ZKI).
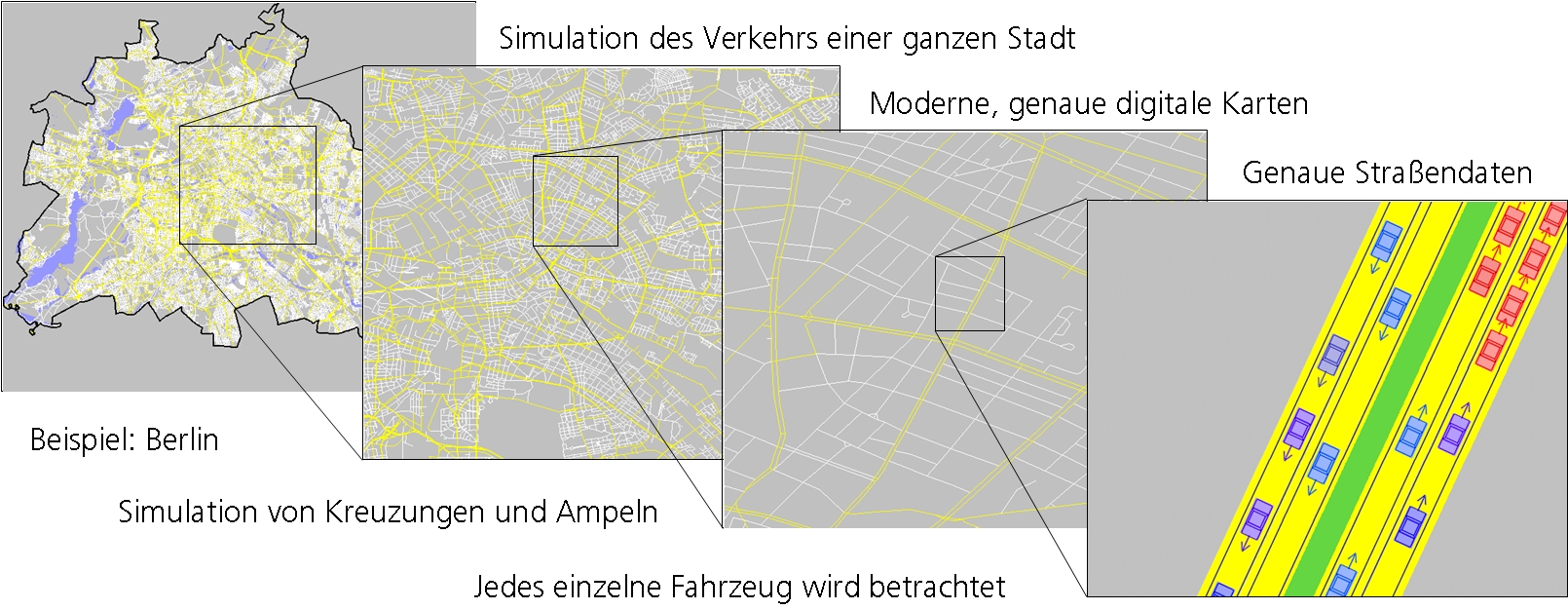
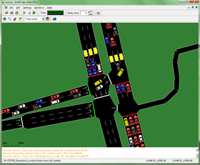
Modelling/Simulation
The open-source simulation software SUMO depicts the traffic situation virtually, bearing in mind traffic requirements and traffic control infrastructure. The result is a simulation of real situations and circumstances that takes into account both major highways and city streets. This makes it possible, for example, to objectively evaluate the quality of traffic control routines or test new methods of data fusion.
In on-line mode, current measurement values from actual sensors can be integrated in order to forecast traffic developments in real time. By changing parameters like traffic requirements or infrastructure, or adding particular traffic management measures to the simulation, specific traffic scenarios can be analysed and measures for controlling and influencing traffic flow (like road blocks and detours) optimised.
The simulated routes can be broken down into stages, each of which is negotiated using a different means of transport. With this approach, the modelling of the public transportation system can be logically integrated as well. This multimodal depiction also makes it possible to answer questions which arise whenever different modes of transport jointly make use of the streets.
With SUMO, traffic management measures and traffic flow regulation by signal lights can be interactively modified with the help of a programmable interface (TraCI). SUMO is also suitable for modelling the communication exchange between vehicles and the traffic infrastructure (C2C and C2X) or simulating road traffic pollutant emission.
Links
- Sensorverbund zur Lagebildunterstützung in Nahe-Echtzeit anlässlich des Landesfeuerwehrtags Baden-Württemberg 2013
- DLR erstellt hochaufgelöste Luftbilder aus den Hochwasserregionen
- Das wasserstoffbetriebene Motorsegelflugzeug Antares im Einsatz für die Lageerfassung bei Großveranstaltungen und zur Katastrophenhilfe
- Einsatz auf Zypern
- Simulation of Urban Mobility
- Projekt iTetris