Fahrwerk-Mechatronik
Dem Fahrwerk des NGC kommt eine Schlüsselrolle für die Sicherheit, die Effizienz und den Komfort des gesamten Fahrzeugs sowie für die Realisierung neuartiger Assistenzfunktionen zu, von der aktiven Unfallvermeidung bis hin zum automatischen Fahren. Als Zielvorstellung haben wir ein modulares, mechatronisch hoch integriertes X-by-Wire-Fahrwerk. Antrieb, Bremsen, Lenkung und weitere fahrdynamisch wirksame Aktuatoren sowie etliche Sensoren sind in das Fahrwerk integriert und machen es mit Hilfe fortschrittlicher Steuer- und Regelungsalgorithmen zu einer in weiten Bereichen frei programmierbaren Einheit. Der damit zu erwartenden Zunahme der radgefederten Masse soll durch konsequenten Leichtbau und innovative Werkstoffsysteme begegnet werden, womit auch ein Beitrag zur Steigerung der Energieeffizienz geleistet wird. Durch die Aufhebung der heute noch üblichen starren mechanischen Verbindungen, insbesondere für die Lenkung, kommt der Entwicklung von Methoden und Werkzeugen zur Sicherstellung der funktionalen Sicherheit, einer hohen Verfügbarkeit und letztlich der Zulassungsfähigkeit eine große Bedeutung zu. Hierbei spielen modellbasierte Entwicklungsprozesse und Toolketten eine wichtige Rolle.
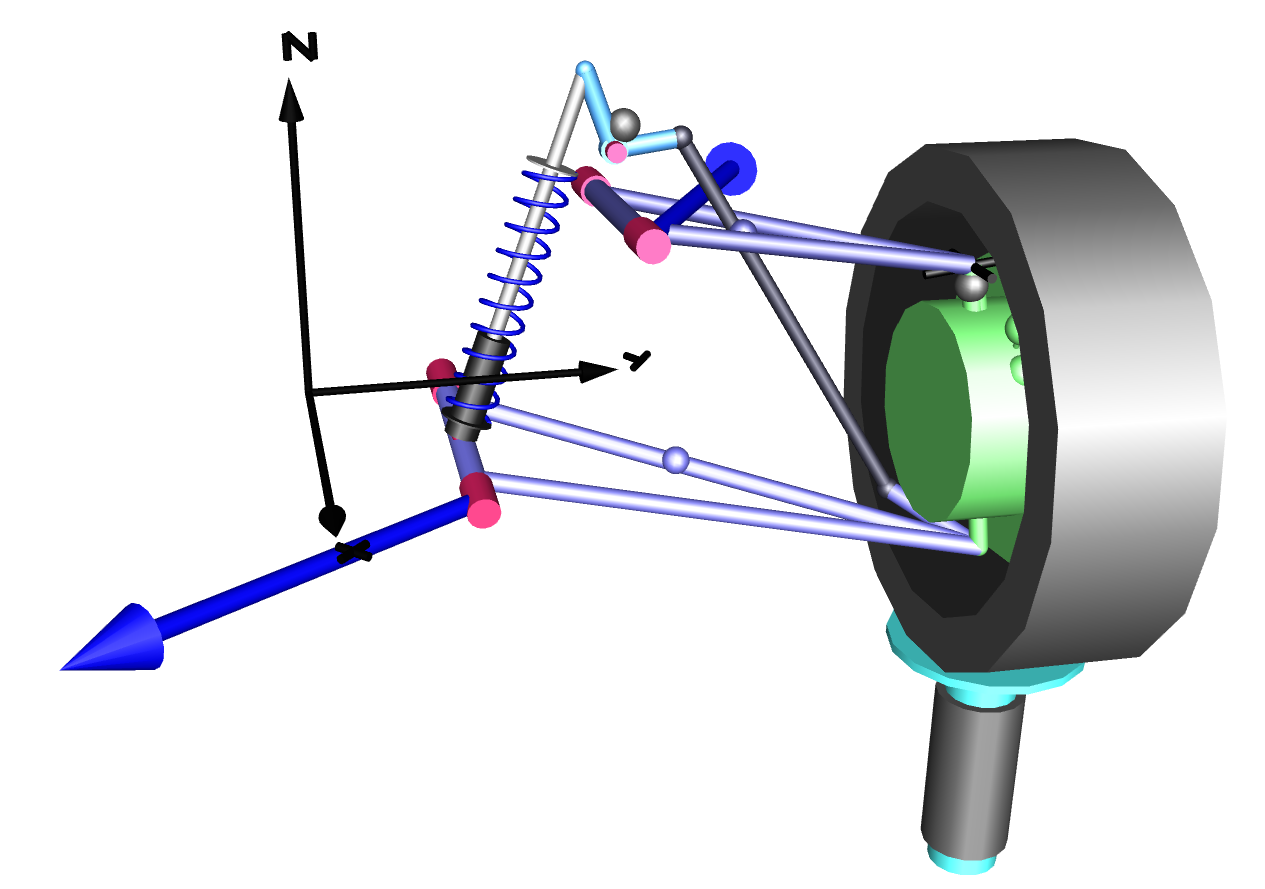
Eine wesentliche Grundlage, die es weiter voranzutreiben gilt, sind auch deshalb die Technologien zur multidisziplinären Modellbildung und Simulation des Fahrwerks in seiner komplexen Wechselwirkung mit der Straße und dem Gesamtfahrzeug auf den Ebenen der elastischen Mehrkörperdynamik, der thermischen und elektrischen Energieflüsse.
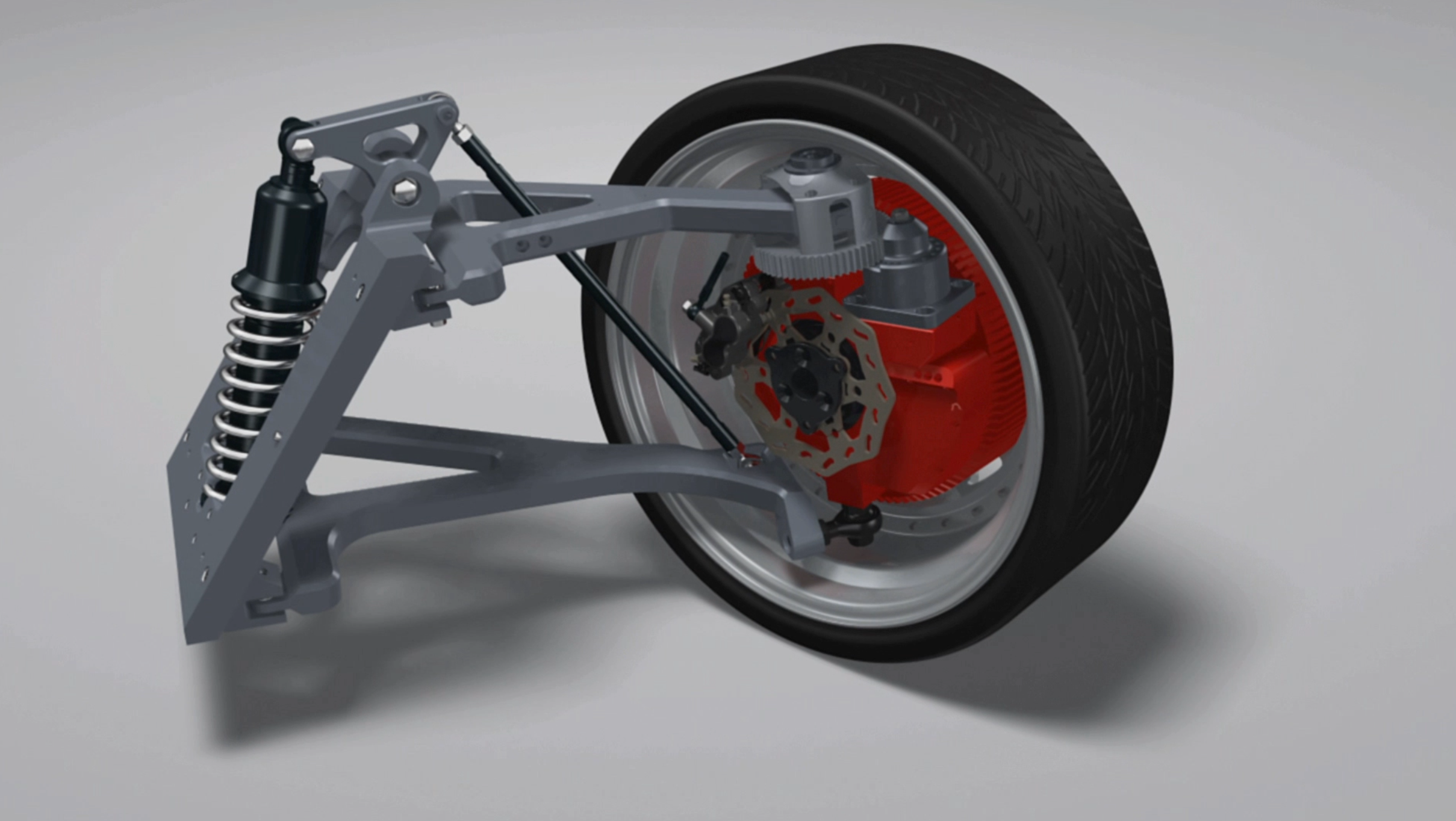
Darüber hinaus leisten wir einen Beitrag zur Verbesserung der Austauschbarkeit und wechselseitigen Nutzung von Modellen zwischen CAD-Konstruktion und der dynamischen Simulation leisten. Unter den grundlegend geänderten Randbedingungen für die Gestaltung eines Fahrwerks ist hiermit die Realisierung von Funktionen wie Radführung und lagerung, Federung und Dämpfung sowie Lenkung und Bremsen neu zu konzipieren und auszulegen.

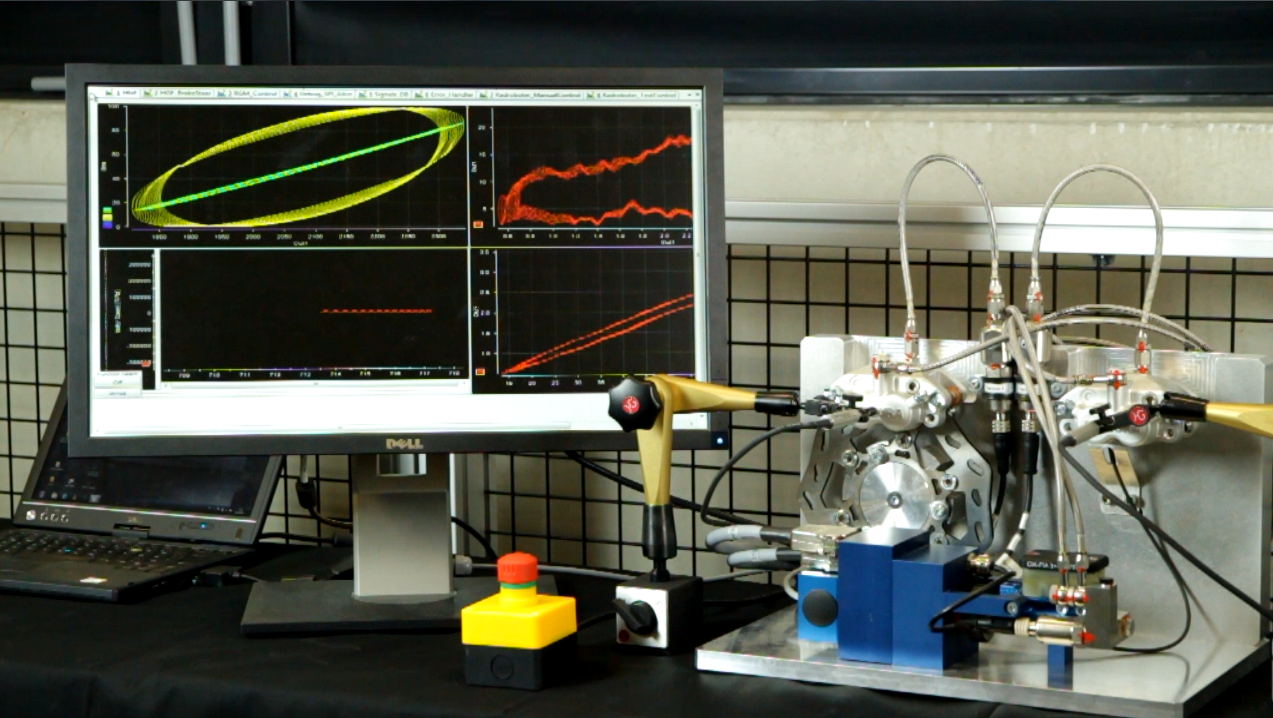
Aufbauend auf bereits von uns erarbeiteten Werkzeugen zur Bewertung der Fahrdynamik und des Komforts erweitern wir unser Instrumentarium, insbesondere die Technologie der Echtzeitfahr- und Bewegungssimulation für die gefahrlose Erprobung. In enger Abstimmung mit der Forschung zur Fahrzeugintelligenz wollen wir für die Implementierung in einer hierarchisch strukturierten Fahrzeugrechnerarchitektur eine intelligente zentrale Fahrzeugsteuerung entwickeln. Diese wird die Ebenen Mensch-Maschine-Schnittstellen (frei gestaltbares Fahrer-Cockpit), Assistenz und Automation sowie Stabilisierung (integrierte Fahrwerkregelung) miteinander vereinen. Beiträge auf dem Gebiet der Fahrzustandsschätzung sollen eine wichtige Voraussetzung für die Realisierbarkeit der Fahrzeugstabilisierung liefern. Um das Potenzial zur Schonung insbesondere der Energieressourcen auszuloten, werden darüber hinaus im Verbund mit den Forschungsarbeiten zu Antriebsstrang, Thermomanagement und Fahrzeugintelligenz fahrzeugsystemweite und nachfolgend auch fahrzeugübergreifende effizienzoptimierte Betriebsstrategien entwickelt. Die konkrete Ausgestaltung aller genannter Themen wird sich im Wesentlichen auf das Fahrzeugkonzept „Urban Modular Vehicle (UMV)“ konzentrieren.