Optical Aerial Systems
3K Camera System

Images recorded from aircraft can encompass the operational area and the traffic situation over large areas at high spatial resolution. With real-time automated image processing taking place directly on board the aircraft and improved algorithms it is possible to provide up-to-date aerial images and traffic data. For this purpose, a digital aerial camera known as the “3K Camera” as well as a rack with several off-the-shelf PCs and a radio antenna for transmission to mobile receiving stations were installed in two DLR research aircraft.
4k Camera System
The 4k system is an improved version evolved from the 3K system and specifically designed for use on DLR’s BO 105 research helicopter. The system is considerably more compact and lightweight than its predecessor, although here too the recorded aerial images are automatically processed on board and can be directly transmitted via a microwave link to a ground station. In addition to recording aerial images, the system is able to generate videos at 4k resolution (ultra-high definition).
MAV
Because of their low weight, Micro Aerial Vehicles (MAVs) can be easily transported and thus employed rapidly and flexibly. Since they are equipped with cameras and communication systems, images and videos can be recorded and transmitted in near-real-time.
Aerial Radar System
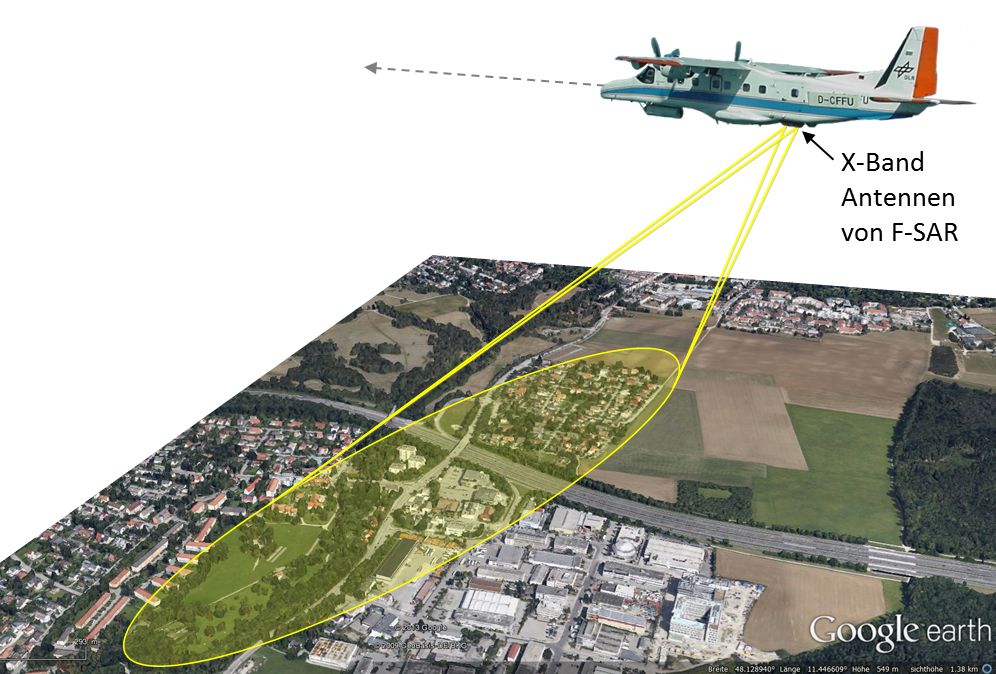
With the help of an imaging radar mounted on an airplane, the immediate street traffic situation and associated infrastructure can be recorded for large areas, day and night, independent of weather and cloud conditions. VABENE++ is able to use for the purpose the F-SAR radar system on the Do 228-212 research aircraft. There is a powerful radar processor on board which extracts traffic information from the recorded radar data in near-real-time and generates high-resolution radar images. These can be used, for example, to monitor the highly dynamic changes in parking slot occupancy. The traffic information and data are transferred to the ground via radio contact.
Ground-based Sensors
Induction Loops
Induction loops have been successfully used as part of road traffic technology to detect and classify moving vehicles for over 30 years. Induction loops are invasive traffic detectors fitted into grooves made in the road surface. The induction loop works like a coil connected in parallel to a condenser, thereby forming an oscillating circuit. The resonant frequency of the oscillating circuit depends, for example, on the coil’s inductivity, which changes whenever a metallic object like a motor vehicle is in the vicinity of the loop. The resulting pattern disturbance is analysed by the loop electronics, whereby each vehicle class (passenger car, truck, motorcycle, etc.) produces its own kind of pattern. This makes it possible to classify the vehicle, and with two loops the vehicle’s direction of motion and velocity can be ascertained as well.
Overhead Sensors
Overhead sensors are, in contrast to induction loops, non-invasive since they are installed above the roadway, for example on the lane-spanning structures used to display traffic signs and messages, which significantly reduces maintenance costs. Radar sensors, which are mounted at an inclination between 30° und 60° above the traffic lane, are a typical example. The detectors are directed toward the vehicles, whereby the distance between detector and vehicle is several meters. The radar emits a so-called primary signal that is reflected by the vehicle as a secondary signal, and this echo is analysed by the system’s electronics. Vehicle class, direction of motion, velocity (Doppler effect) as well as the distance to the vehicle, time gaps and vehicle lengths can all be identified.
Floating Car Data (FCD)
In contrast to the traditional ground-based sensors described above, finding out the traffic situation with FCD uses a somewhat different approach. This data source consists of one or several vehicle fleets under the control of a disposition system which must know at any instant just where each vehicle is located. Taxis are an example of such a fleet. Each vehicle periodically transmits (at five-second to five-minute intervals) a short data telegram to a server, which keeps track of the vehicle’s momentary location, determined by GPS. From this time-tagged sequence of positions the methodologies developed at DLR can calculate the actual travel time on the individual road segments of the traffic network and provide users with this information. This is a valuable resource for telematics, logistics and routing applications since travel times can hardly be determined with conventional methods.
Platforms
The following research aircraft and helicopters are available from DLR’s fleet of aerial vehicles:
