
Für die Inbetriebnahme und einen zuverlässigen Betrieb zukünftiger hoch- und vollautomatisierter Straßenfahrzeuge werden neue Methoden und Werkzeugketten für die Validierung und Verifikation benötigt. Hierbei sind vorrangig die Fragen zu beantworten, wie sich das automatisierte Fahrzeug in einer Vielzahl von bekannten und zum Teil noch unbekannten Verkehrssituationen zu verhalten hat und ob sich die Fahrfunktion im Feld entsprechend ihres zuvor spezifizierten Soll-Verhaltens befindet.
Heute zielen die in der Industrie angewendeten Verifikations- und Validierungstechniken vor allem auf die Entwurfsphase ab und beschäftigen sich mit der Frage „Was und wie muss getestet werden, damit ein Fahrzeug in Betrieb genommen werden darf?“. Doch dies reicht nicht mehr aus, sobald der Fahrer in einer sich dynamisch veränderbaren Umgebung durch eine automatische Fahrfunktion ersetzt wird. Heutige Verfahren skalieren somit schlecht mit der zunehmenden Komplexität neuer Fahrfunktionen und dem Kontext - auch Operational Design Domain (ODD) genannt - in dem sie eingesetzt werden sollen. Eine mögliche Lösung liegt in der Verifikation und Validierung (V&V) während des gesamten Produktlebenszyklus mit Hilfe von digitalen Zwillingen. Hierfür werden Informationen aus dem Testfeld Niedersachsen genutzt, um eine kontinuierliche Verbesserung von Automationsfunktionen (z.B. mit Hilfe von Updates) zu gewährleisten. Die Etablierung eines solchen felddatengestützten kontinuierlichen Vorgehens ermöglicht darüber hinaus auch den zukünftigen Einsatz von lernenden Algorithmen und weiteren KI-basierten Verfahren.
Zur Unterstützung heutiger V&V-Verfahren dienen bereits komplexe Simulatoren als Umgebung für deterministische und reproduzierbare Testkampagnen. Auch heute sind im DLR bereits eine Vielzahl unterschiedlicher Simulatoren und V&V-Frameworks im Einsatz. Dabei kommt es nicht selten zu komplexen, intransparenten Werkzeugabhängigkeiten, welche die Wiederverwendbarkeit, Erweiterung und den Transfer erschweren. Aus diesem Grund wird ein Baukastensystem zur Integration unterschiedlicher Simulatoren mit Schnittstellen zu aufeinander aufbauenden und abgestimmten V&V-Werkzeugketten für den zukünftigen Einsatz benötigt.
Das Projekt V&V4NGC setzt genau hier an, indem es die Voraussetzungen für eine simulationsbasierte Verifikation und Validierung neuer Fahrfunktionen für hoch automatisierte Fahrzeuge während der Entwicklung sowie im laufenden Betrieb schafft.
Projektziel
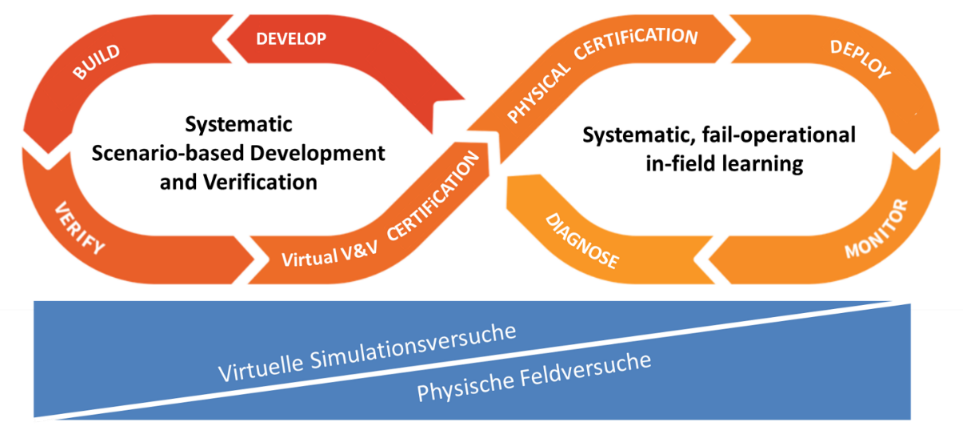
Das V&V4NGC Projekt möchte die oben beschriebenen Herausforderungen durch den Aufbau einer gemischt virtuell/physikalischen Simulationsumgebung für das Next Generation Car (NGC)-Konzept bzw. alle zukünftigen Fahrzeugkonzepte angehen. Diese Simulationsumgebung soll für ein kontinuierliches Design sowie eine kontinuierliche Verifikation und Validierung bis hin zur virtuellen Zertifizierung von automatischen Fahrfunktionen und vollautomatisierten Straßenfahrzeugen eingesetzt werden können. Mit dem Begriff „kontinuierlich“ ist hier insbesondere eine Unterstützung während des gesamten Produkt- bzw. Fahrzeuglebenszyklus gemeint. Die technische Umsetzung soll durch einen Prozess, der die Entwicklungs- mit der Betriebsphase zu einem kontinuierlichen DevOps-Zyklus (kurz für Development and Operations) verbindet, begleitet werden.
Hierzu werden Modellierungstechniken und -sprachen sowie Schnittstellenstandards benötigt, um ein integriertes Systems Engineering und damit modellbasierte Safety-by-Design-Ansätze zu unterstützen. Im Projekt werden integrierte simulationsbasierte Methoden, einschließlich X-in-the-loop, sowie formale Verifikationsmethoden für bekannte und a priori unbekannte oder seltene Szenarien entwickeln und erforschen. Zudem wird berücksichtigt, wie man eine Symbiose aus maschinellen Lernansätzen und deterministischen Steuerungs-, Entwurfs- und Analysemethoden schaffen kann.
Darüber hinaus sollen integrierte Test- und virtuelle Zertifizierungsmethoden entwickelt werden, welche die Qualifizierung von Fahrzeugen sowie deren Subsysteme für den Straßenverkehr von morgen ermöglichen. Die Bandbreite reicht dabei von Hardware und Funktionen im einzelnen Fahrzeug bis hin zum kompletten Straßenverkehrssystem und kombiniert simulationsbasierte Methoden mit Testmethoden im Testfeld Niedersachsen. So werden Flottendaten für Trainings- und Testfälle, sowohl für klassische Algorithmen als auch für KI-Methoden erhoben. Um effizient Datensätze mit einer bekannten und annotierten Ground Truth für alle Testfälle zu erstellen, werden Methoden entwickelt, um reale und synthetische Daten effektiv zu kombinieren.
Neben den o.g. Offline-Verifikationsmethoden (die außerhalb der Fahrzeuge, zumeist in der Design-Phase, vor der Inbetriebnahme von Fahrzeugen oder Fahrzeugfunktionen durchgeführt werden), wird insbesondere auch eine Erweiterung in Richtung einer Online-Verifikation untersucht. Diese Online-Verifikation bezieht sich auf eine Verifikation der Echtzeit-Bewegungsplanung von Fahrzeugen im Feld (d.h. während des Betriebs, „Operations“) sowie der Detektion nicht bekannter bzw. neuer Situationen während der Fahrt. Diese wiederum ermöglicht durch Software-Updates eine kontinuierliche Verbesserung und Anpassung an sich dynamisch verändernde Einsatzumgebungen, den sogenannten Operational Design Domains.
Zuletzt soll auf den Grundlagen der Ergebnisse von V&V4NGC die virtuelle Zertifizierung zu einem laufenden, d.h. kontinuierlich während der Lebensdauer eines Fahrzeugs angewendeten Konzepts, erfolgen. Diese Zertifizierung soll zukünftig die Sicherheit und hohe Verfügbarkeit hochautomatisierter Fahrzeuge in sich dynamisch veränderbaren Umgebungen gewährleisten.
Projektname:
V&V4NGC - Methoden, Prozesse und Werkzeugketten für die Validierung & Verifikation von NGC
Laufzeit:
01/2022 bis 12/2025
Projektvolumen:
34 Mio. €
Auftraggeber:
DLR-Programmdirektion Verkehr, Deutsches Zentrum für Luft- und Raumfahrt e. V., Köln
Beteiligte DLR-Institute:
Institut für Systems Engineering für zukünftige Mobilität
Institut für Fahrzeugkonzepte
Institut für Flugsystemtechnik
Institut für Hochfrequenztechnik und Radarsysteme
Institut für KI-Sicherheit
Institut für Kommunikation und Navigation
Institut für Methodik der Fernerkundung
Institut für Optische Sensorsysteme
Institut für Softwaretechnologie
Institut für Systemdynamik und Regelungstechnik
Institut für Verkehrssystemtechnik
Systemhaus Technik
Flugexperimente