The research project ’Next GenerationTrain’ (NGT) is supposed to develop an efficient and sustainable high-speed train. Vehicle safety thereby is a main focus.
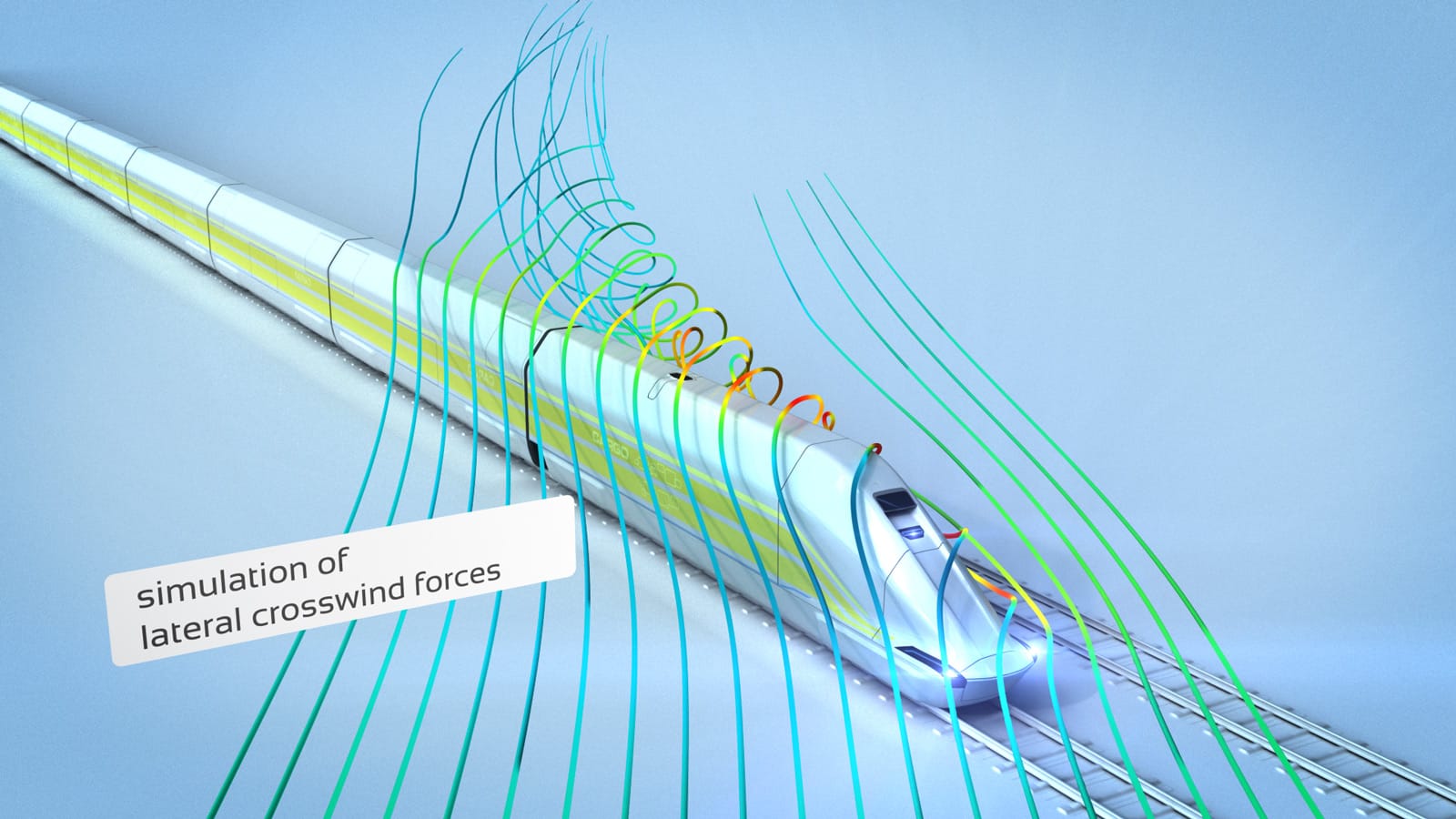
Double-deck configuration, lightweight design and the operational speed of 400 km/h in daily operation are three key features of the NGT tailored to achieve high performance with low life-cycle costs. However, these three items together also imply a major safety challenge with respect to crosswind stability.
Concept
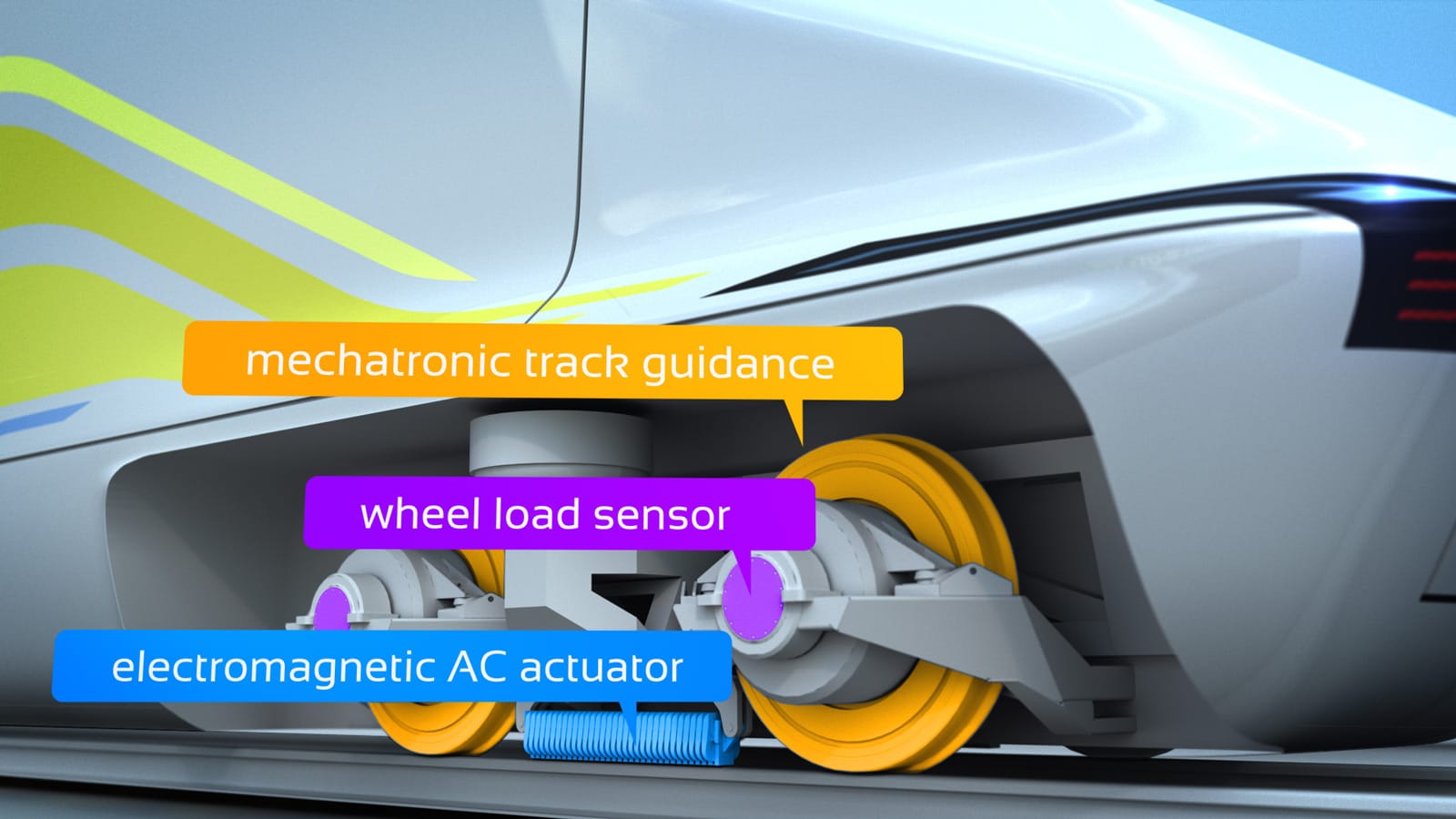
On the one hand, the mechatronic running gear of the NGT utilizes sensors for guidance tasks that are also capable of measuring the wheel unloading due to high cross winds. In order to prevent the risk of overturning, the wheel must not be totally unloaded, i.e. the wheel must keep in touch with the rail all the time.
On the other hand, the NGT is intended to use eddy current brakes that employ electromagnets in order to generate braking forces independently from the wheel-rail contact. These electromagnets may also be driven in a specifically tuned mode where large attraction forces in vertical direction occur and counteract the wheel unloading.
Sensors and electromagnets are now integrated into an active control loop. The information on the wheel unloading is transmitted and processed in order to control the attraction force in such a way that the wheel load does not fall below a specific threshold. The danger of overturning of the NGT due to high cross-winds is eliminated this way.