Im Straßenverkehr bewegen wir uns selten isoliert, sondern interagieren mit anderen Verkehrsteilnehmenden, zum Beispiel an Zebrastreifen, an Kreuzungen oder an Autobahnauffahrten. In den meisten Fällen geben uns Verkehrsregeln vor, wie wir uns zu verhalten haben. Es gibt aber auch Verkehrssituationen, die nicht klar geregelt sind. Hier tragen insbesondere Kommunikation und Kooperation zu einem Gelingen der Situation bei. Entsprechend müssen auch autonome Fahrzeuge mit uns kommunizieren und kooperieren können, wenn sie Teil unseres Verkehrssystems werden.
Um die Entwicklung kooperativ interagierender autonomer Fahrzeuge zu unterstützen, untersuchen wir gemeinsam mit der Universität Ulm im Rahmen des Projekts CoMove das Kooperationsverhalten von Autofahrenden in komplexen Verkehrssituationen. Die Arbeiten vom DLR-Institut für Verkehrssystemtechnik konzentrieren sich dabei insbesondere auf die Entwicklung von geeigneten Methoden zur Beschreibung und Bewertung dieses Kooperationsverhaltens und der damit einhergehenden dynamischen Wechselwirkungsprozesse der Beteiligten.
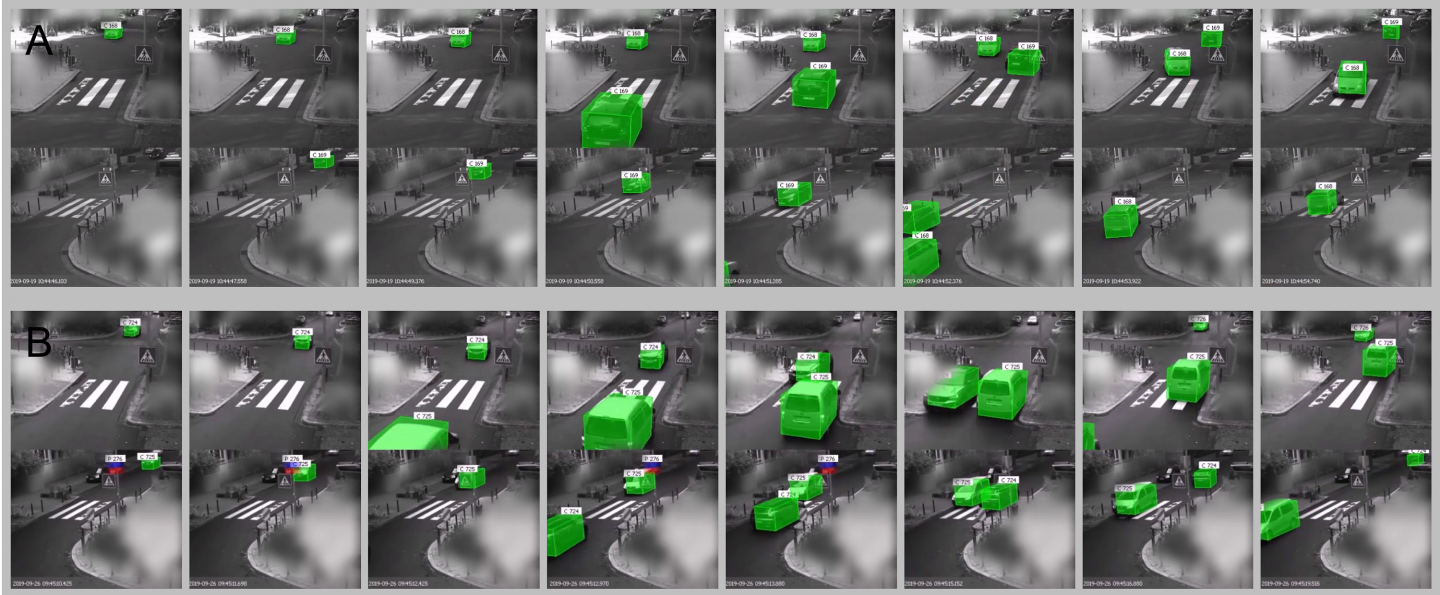
Mithilfe empirischer Untersuchungen, welche sowohl fokussierte Interviews und Onlinestudien als auch Verkehrsbeobachtungen und Studien in (vernetzten) Fahrsimulatoren umfassen, werden insbesondere die Entscheidungs- und Kommunikationsprozesse kooperierender Autofahrender untersucht. Die Qualität dieser Studien wird dabei maßgeblich von den zur Verfügung stehenden Methoden zur Erfassung des Kooperationsverhaltens bestimmt, d.h. wie reliabel und valide das Konzept Kooperation quantifiziert werden kann.
Die Ziele des Projekts sind entsprechend die Entwicklung geeigneter Methoden sowie das detaillierte Verstehen und Beschreiben der dynamischen Wechselwirkungsprozesse und somit die Schaffung einer empirisch validen Grundlage für die Entwicklung von Handlungsplanungsstrategien kooperativ interagierender Automobile. Diese Strategien sind dadurch gekennzeichnet, dass sie für umgebende Verkehrsteilnehmende transparent, nachvollziehbar und vorhersehbar sind, weil sie Verhaltensweisen und Interaktionsstrategien menschlicher Autofahrender reflektieren.
Projektname und -webseite:
CoMove - Verstehens- und entscheidungsbasierte Modellierung des Kooperationsverhaltens zwischen Fahrern in dynamischen Verkehrssituationen und ihre methodologischen Grundlagen
Laufzeit:
09/2019 bis 02/2023
Projektvolumen:
421.000 €
Auftraggeber:
Deutsche Forschungsgemeinschaft (DFG), Schwerpunktprogramm „Kooperativ interagierende Automobile“
Projektbeteiligte:
DLR-Institut für Verkehrssystemtechnik
Universität Ulm (Prof. Baumann)