Automatisiertes Fahren wird immer greifbarer und erhält langsam aber sicher Einzug in unsere Straßen. Testverfahren zur Absicherung von automatisierten Fahrfunktionen sind im alltäglichen Verkehr so gut wie unmöglich - viel zu aufwändig, gefährlich und kostspielig. Deshalb entwickeln die Forscher des DLR-Instituts für Verkehrssystemtechnik bereits seit vielen Jahren ein virtuelles Abbild einer Stadt und deren komplexen Straßengeflechts, um bereits im Vorfeld so detailliert wie möglich testen zu können.
Im Projekt Virtuelle Welt haben die Wissenschaftler Braunschweig als Prototypen einer virtuellen Stadt mit tausenden von Daten hochgenau abgebildet. In jahrelanger Entwicklungsarbeit haben sie ein exaktes dreidimensionales Abbild der Straßen und der Infrastruktur Braunschweigs erschaffen, um Test- und Absicherungsverfahren automatisierter Fahrfunktionen in der Simulation und später auch im Realverkehr durchführen zu können. „Damit beschleunigen wir die Einführung automatisierter Fahrzeuge in den Markt erheblich“, weiß Wissenschaftler Michael Scholz. Alle baulichen Einzelheiten über Fahrbahnmarkierungen, Radwege, Gullideckel bis hin zu Bushaltestellen und Bordsteinkanten haben die Forscher mit Hilfe von Open Street Map-, Kataster-, Mobile-Mapping- und georeferenzierten Daten aus der Luft zusammengetragen und wie einzelne Puzzleteile zusammengefügt. „Für diese mühevolle Arbeit haben wir einen automatisierten Prozess entwickelt, der alle Daten in einem digitalen Atlas zusammenführt“, erklärt Michael Scholz. „Das spart Zeit und ermöglicht es uns, für die Tests von automatisierten Fahrzeugen im realen Verkehr eine digitale Stadtkarte zu extrahieren, die wir für eine bestimmte Forschungsfahrt gerade benötigen.“
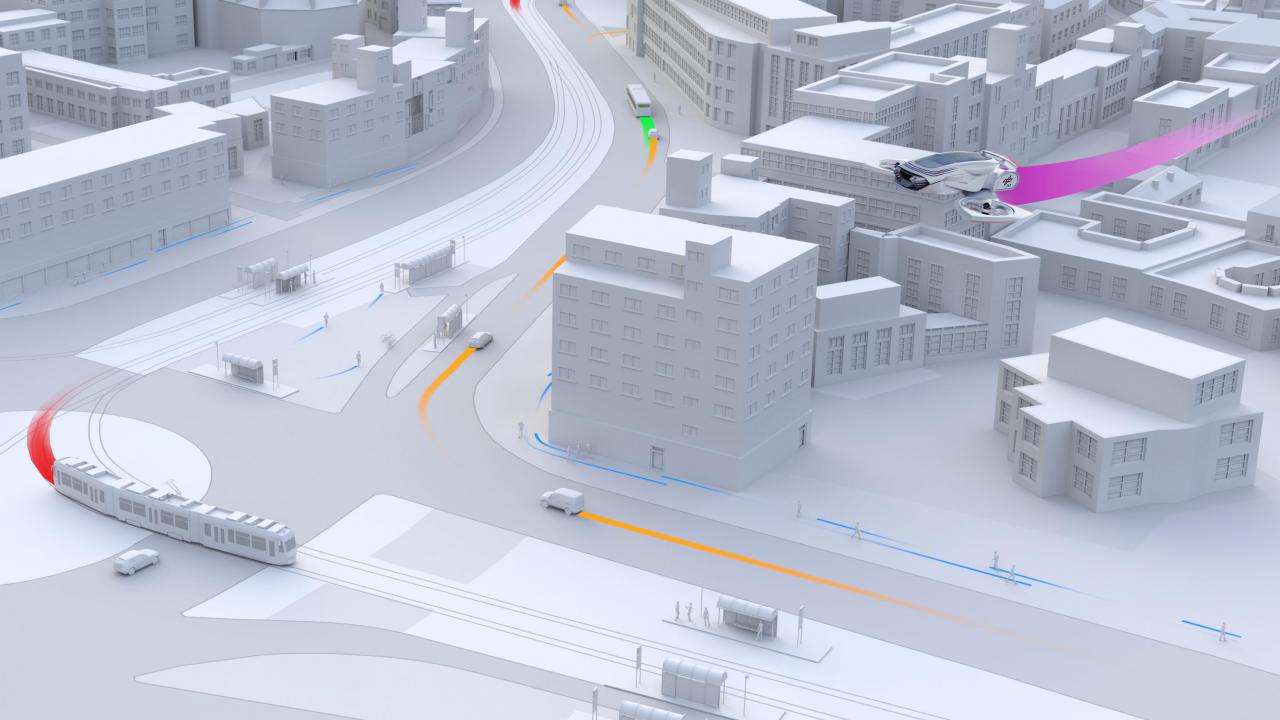
Denn nachdem alle relevanten Tests sicher und ohne jedes Risiko in der Simulation durchgeführt sind, muss ein automatisiertes Fahrzeug auch im realen Verkehr getestet werden. Die digitale Karte liefert dem Fahrzeug alle relevanten Informationen, die es benötigt, um im Stadtverkehr exakt zu wissen, wo genau es sich befindet. Neben der Kommunikation mit der Infrastruktur, beispielsweise über 5G-Technologie, und der verbauten Sensorik kann das Fahrzeug zwar selbst relativ genau seine Umgebung erfassen, die digitale Karte liefert aber zusätzlich relevante Informationen über Hindernisse außerhalb der sensorischen Reichweite. „Ein automatisiertes Fahrzeug soll uns später einmal besser als jeder Mensch es könnte von A nach B bringen“, so Michael Scholz. „Mit den exakt nachgebildeten virtuellen Straßen und den digitalen Karten, kommen wir diesem Zukunftsszenario ein ganzes Stück näher und schaffen damit die Grundlage für eine schnelle und kostengünstige Forschung an diesem Thema.“ Das detaillierte Abbild dieser urbanen Umgebung bietet weiterhin eine wertvolle Datenbasis für stadtplanerische Aufgaben und die Entwicklung neuer Mobilitätskonzepte.