Der „Next Generation Train“ (NGT) ist ein Leitkonzept für die Verkehrsforschung am Deutschen Zentrum für Luft- und Raumfahrt (DLR). Dieser doppelstöckige Hochgeschwindigkeitszug in Leichtbauweise bildet den Rahmen für die Entwicklung von Konzepten, Methoden und Technologien für den Schienenverkehr der Zukunft. Der Fahrwerkstechnologie kommt hierbei eine Schlüsselrolle zu.
Im virtuellen Entwurf, in der Simulation und in M 1:5 Experimenten hat sich das Konzept eines neuartigen strukturoptimierten Einzelrad-Einzelfahrwerkes mit mechatronischer Spurführung und radnahem Direktantrieb als vielversprechender Ansatz erwiesen.
Als nächster Entwicklungsschritt wurde nun ein funktionsfähiger M 1:1 Prototyp des NGT-Fahrwerks gebaut und wird nun als Forschungsinfrastruktur NGT-Fahrwerk (FuN) für DLR interne und externe Forschungsaktivitäten zur Verfügung gestellt Ab 2024 soll FuN dann zunächst drei Jahre lang in jährlich zwei Messkampagnen auf externen Rollprüfständen betrieben werden. Darüber hinaus ist die weitere Erprobung in einem Schienenfahrzeug auf Test- und Prüfanlagen vorgesehen.
Projektziele
- Validierung und Demonstration der drei im NGT-Projekt vorgeschlagenen Basisinnovationen für Schienenfahrzeug-Fahrwerke
-
mechatronische Spurführung
-
Leichtbau und
-
radnaher Direktantrieb
-
- Ertüchtigung von NGT-Projektergebnissen für den Technologie-Reifegrad (TRL) 6
Technologien des NGT- Fahrwerkes
Mechatronische Spurführung
Die herkömmliche Spurführung in heutigen Hochgeschwindigkeitsfahrwerken basiert auf den passiven Stabilitätseigenschaften von Radsätzen, bei der die beiden profilierten Räder mit einer Welle verbunden und so deren Drehzahlen gekoppelt sind.
Die im NGT-Fahrwerk realisierte aktive Regelung der beiden einzeln angetriebenen Räder erlaubt es aber, die Position des Radpaares im Spurkanal frei zu bestimmen, dessen Ausrichtung im Gleisbogen radial einzustellen, Gleislagestörungen entgegen zu wirken und neue mechatronische Funktionen wie z.B. die Steuerung des Verschleißprofils zu verwirklichen. Da die Radsatzwelle bei dieser mechatronischen Spurführung entfällt, wird in Doppelstockwagen ein ebener Durchgang ohne Stufen auch auf der unteren Ebene möglich.
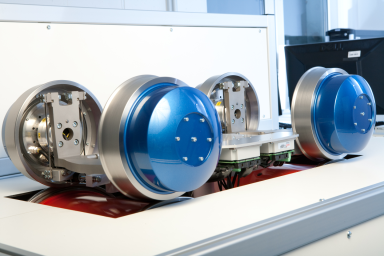 M 1:5 Experimentalfahrwerk des DLR zur mechatronischen Spurführung
M 1:5 Experimentalfahrwerk des DLR zur mechatronischen Spurführung
Leichtbau
Der konsequente, durch rechnergestützte Strukturoptimierung methodisch unterstützte Leichtbau erlaubt die Realisierung eines Triebfahrwerkes auf dem Gewichts-Niveau eines konventionellen Laufdrehgestells. Damit erhöht sich die Nutzlastkapazität bei gleichbleibenden Radlasten oder andersherum gedacht: vermindern sich die Radlasten bei gleichbleibender Nutzlast. In der Herstellung werden Roh- und Werkstoffe eingespart, im Betrieb muss weniger Energie für die Beschleunigung und das Abbremsen der Eigenmassen aufgebracht werden, die Lebenszykluskosten sinken.
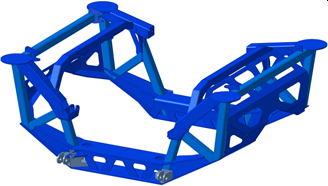 CAD-Modell der Strukturoptimierte Leichtbaukonstruktion des Fahrwerkrahmens
CAD-Modell der Strukturoptimierte Leichtbaukonstruktion des Fahrwerkrahmens
Radnaher Direktantrieb
Als Antriebe werden permanent erregte Synchronmotoren mit hoher Momentendichte und Wirkungsgrad eingesetzt, so dass auch hier die oben beschriebenen Leichtbauvorteile auf die Lebenszykluskosten zum Tragen kommen. Die Motoren sind Gummi-gefedert auf dem Radträger montiert, so dass sie von hochfrequenten Gleislagestörungen entkoppelt sind und möglichst kleine ungefederte Massen das Gleis beanspruchen. Federweg-ausgleichenden, aber torsionssteife Laschen-Kupplungen verbinden die Motoren getriebelos mit den zugeordneten Rädern.
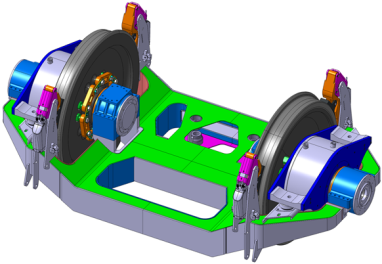 CAD-Konstruktion der Rad- und Motoranbindung an den Radträger
CAD-Konstruktion der Rad- und Motoranbindung an den Radträger
Integrationsprüfstand

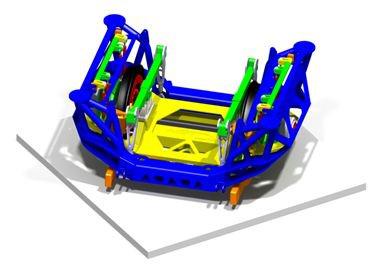
Am Ende der gegenwärtigen Aufbauphase des Projekts NGT-FuN in 20221 wird der M1:1 Prototyp des NGT-Fahrwerkes in einem Montage- und Integrationsprüfstand zur Verfügung stehen. Dieser Aufbau, Fahrwerk im Integrationsprüfstand, ermöglicht eine einfache, qualitative Funktionsprüfung der Sensorik, der Aktuatorik sowie der Steuerungs- und Automatisierungstechnik.
Neben diesen qualitativen Experimenten mit stark herabgesetzter Leistungsausnahme ist der Aufbau dazu geeignet, das Fahrwerksprinzip Besuchern im Labor oder auf einem Messestand, z.B. auf der Innotrans 2022, zu demonstrieren.
Gegenwärtig wird die Gestaltung des Integrationsprüfstandes mit Hilfe von Mehrkörpersimulation der 4 verschiedenen Anwendungsszenarien virtuell erprobt:
- Szenario 1: Geradeauslauf des Fahrwerkes, mittig im Spurkanal positioniert
- Szenario 2: Geradeauslauf des Fahrwerkes mit vorgegebener Lateralposition im Spurkanal
- Szenario 3: artifizieller, durch Regelung aufgeprägter Wellenlauf des Fahrwerks mit steuerbarer Frequenz und Fahrgeschwindigkeit
- Szenario 4: das Fahrwerk folgt einer vorgegebenen transienten Trajektorie, die einer stochastischen Gleislagestörung nachempfunden ist
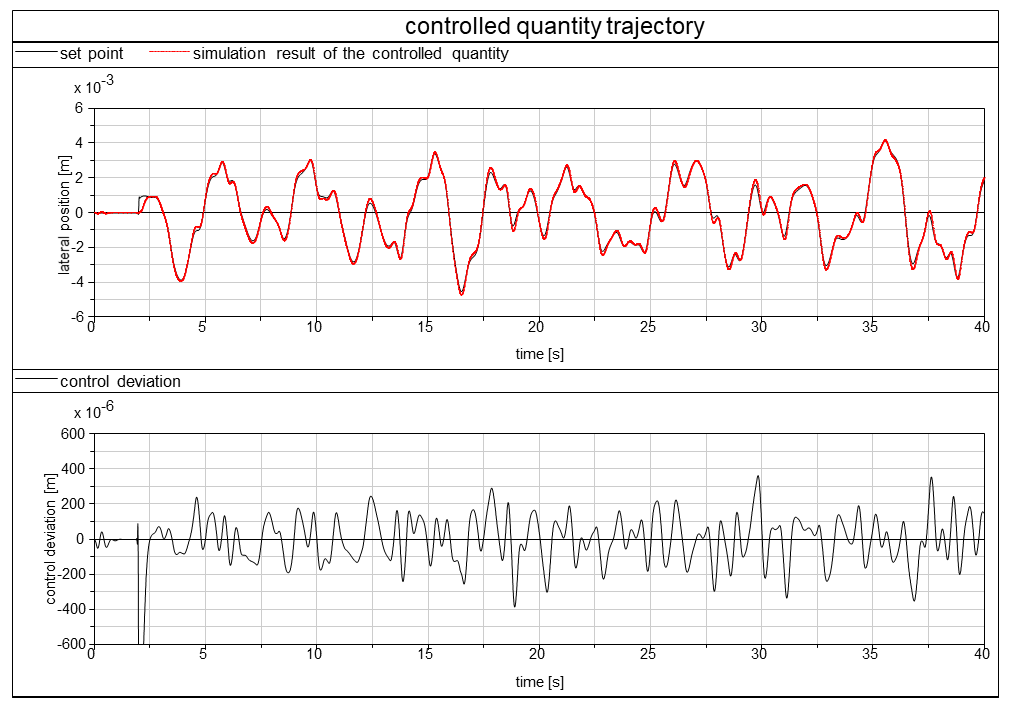
©DLR Simulationsergebnis der Soll- und Ist-Trajektorie für die lateral Position y und der Gierwinkel der geregelten Fahwerks im Szenario 4