Der Demonstrator auf der Innotrans 2018
Der Demonstrator zeigt eine am DLR entwickelte Umsetzung des „Dynamischen Flügelns“ am Beispiel eines Hochgeschwindigkeitszugs NGT HST und eines Güterzugs NGT CARGO. Das dynamische Stärken und Schwächen eines Zugverbandes ermöglicht die folgenden Funktionen:
- Erhöhung des Streckendurchsatzes
- Getrennte Einfahrt in Richtungsgleise
- Einfahrt überlanger Züge an kurzen Bahnsteigen
Der Messebesucher kann das Führungsfahrzeug des elektronisch gekoppelten Zugverbands selbst steuern und die Abstandsregelung der beiden Fahrzeuge beeinflussen. Weiterhin werden die Teilverfahren Kuppeln und Entkuppeln dargestellt. Ziel ist, dieses neuartige Verfahren für den Messebesucher selbst „erfahrbar“ zu machen.
Wissenschaftlicher Hintergrund
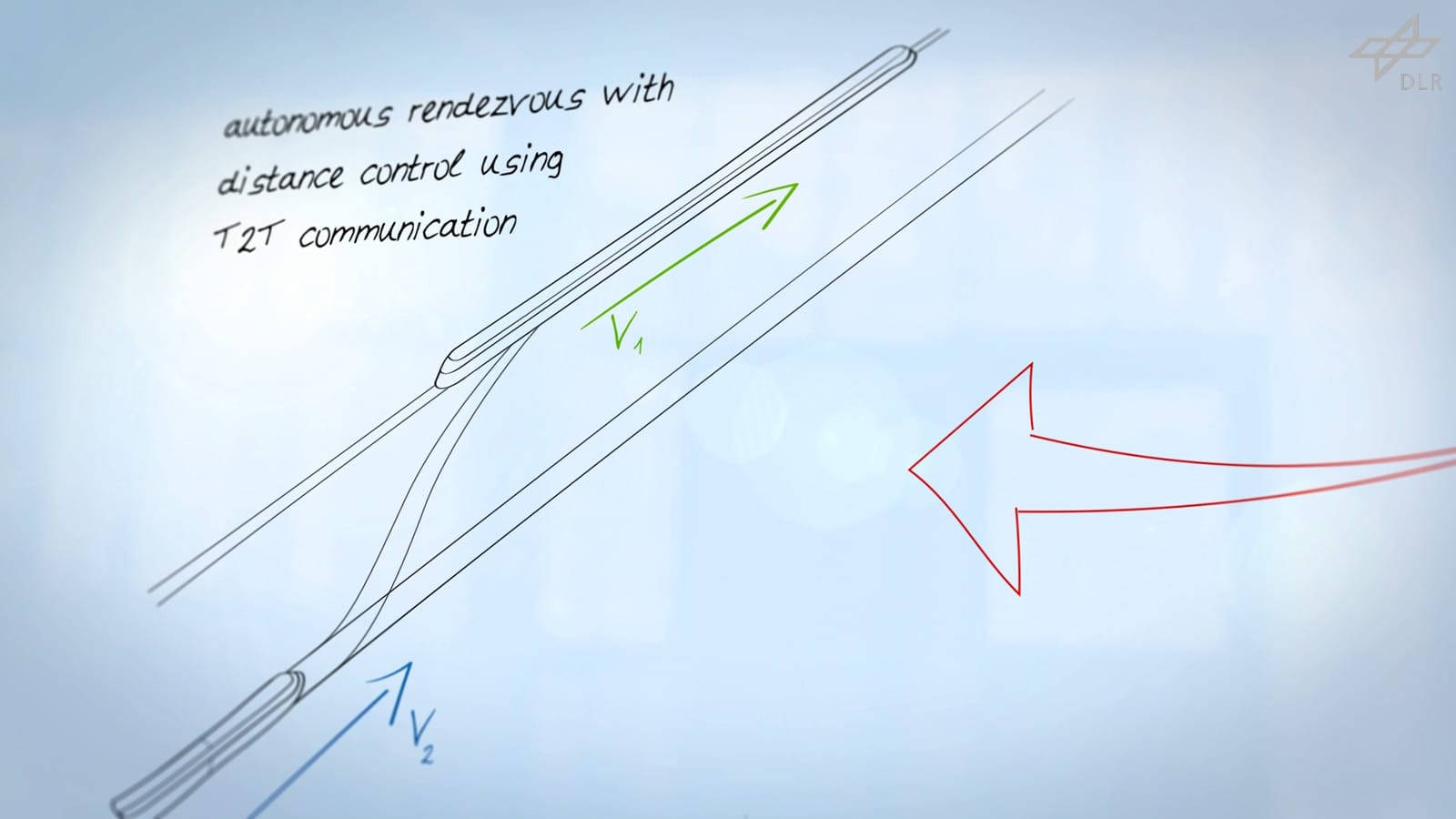
Die Nutzung des bestehenden Schienennetzes kann gesteigert werden, wenn während der Fahrt durch ein Rendezvousmanöver auf freier Strecke (auch mit Gleiswechsel) eine Kupplung von Zügen erfolgt. Allerdings sind diese Züge nicht mehr mechanisch sondern fernwirkend gekuppelt, d.h., ein Führungsfahrzeug steuert durch elektronische Anbindung ein oder mehrere Nachfolgerfahrzeuge. Dieses betriebliche Verfahren wird auch als Dynamisches Flügeln bezeichnet.
Der fernwirkend gekuppelte Zugverband wird signaltechnisch als ein Zug behandelt. Dies entspricht innerhalb des Zugverbandes dem Fahren im relativen Bremswegabstand allerdings mit zusätzlicher elektronischer Sicherung. Mit anderen Zugverbänden wird auf elektronische Sicht gefahren. Um den Streckendurchsatz zu erhöhen, kann bei genormter Funk-Schnittstelle sogar mit verschiedenen Schienenfahrzeugen ein Zugverband gebildet werden. Diese Bündelung des Personen- und Güterverkehrs macht es möglich, die vorhandenen Streckenkapazitäten optimal zu nutzen.
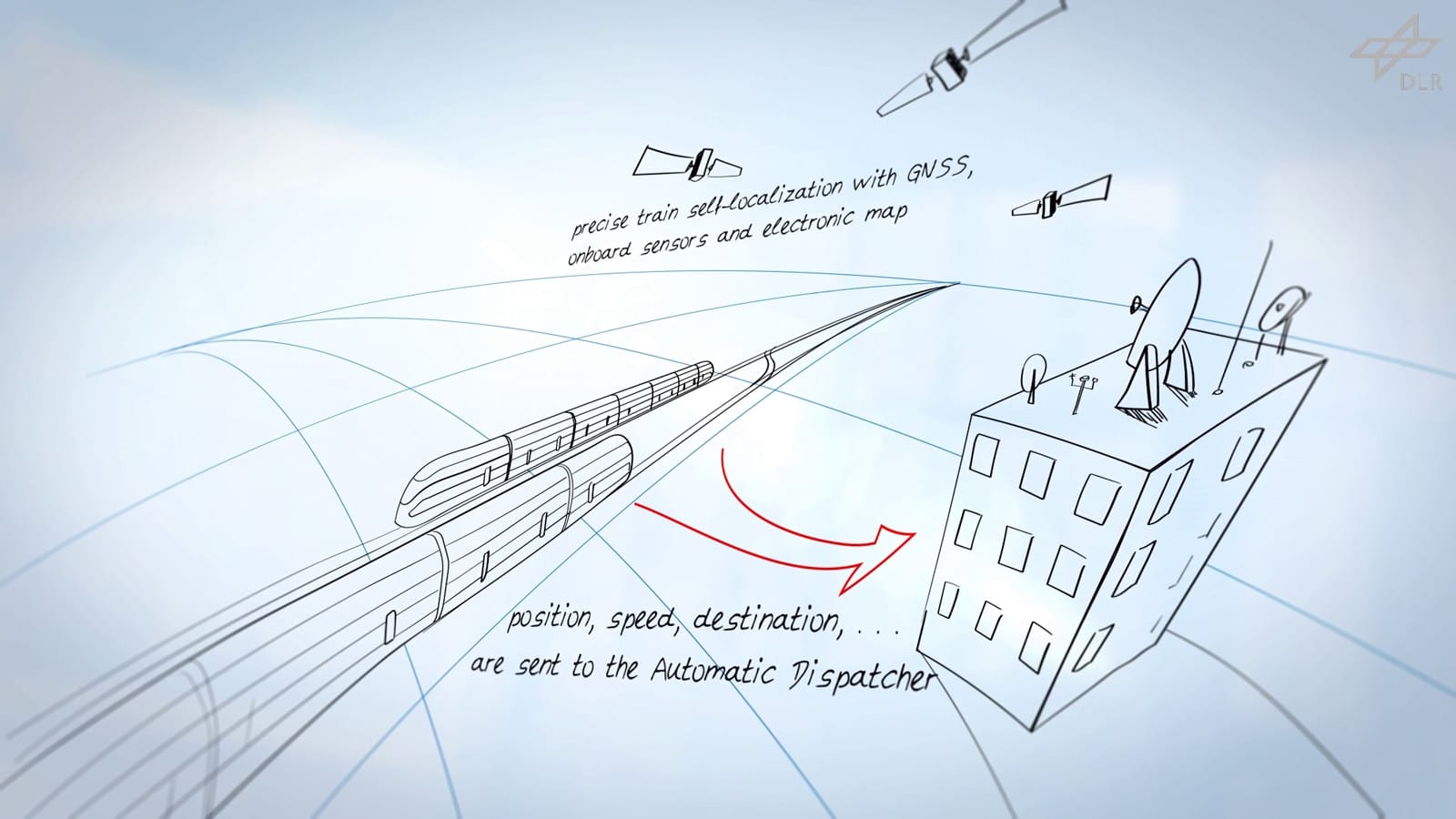
Für die Durchführung der Rendezvousmanöver wird ein „automatischer Disponent" in einer Leitzentrale eingesetzt. Er entscheidet aufgrund der Verkehrslage über die Durchführbarkeit des Rendezvous. Während des Manövers berechnet er Geschwindigkeitstrajektorien für die zu kuppelnden Züge. Wenn die direkte Datenkommunikation und Abstandshaltung zwischen den Zügen stabil ist, geht die Kontrolle (wieder) auf das Führungsfahrzeug über. Im Zugverband berechnen alle Fahrzeuge mit eigenen Sensordaten den dynamischen Zustand des vorausfahrenden Fahrzeuges zur direkten Abstandshaltung. Der dynamische Zustand des Führungsfahrzeuges wird allen Fahrzeugen zusätzlich übermittelt.
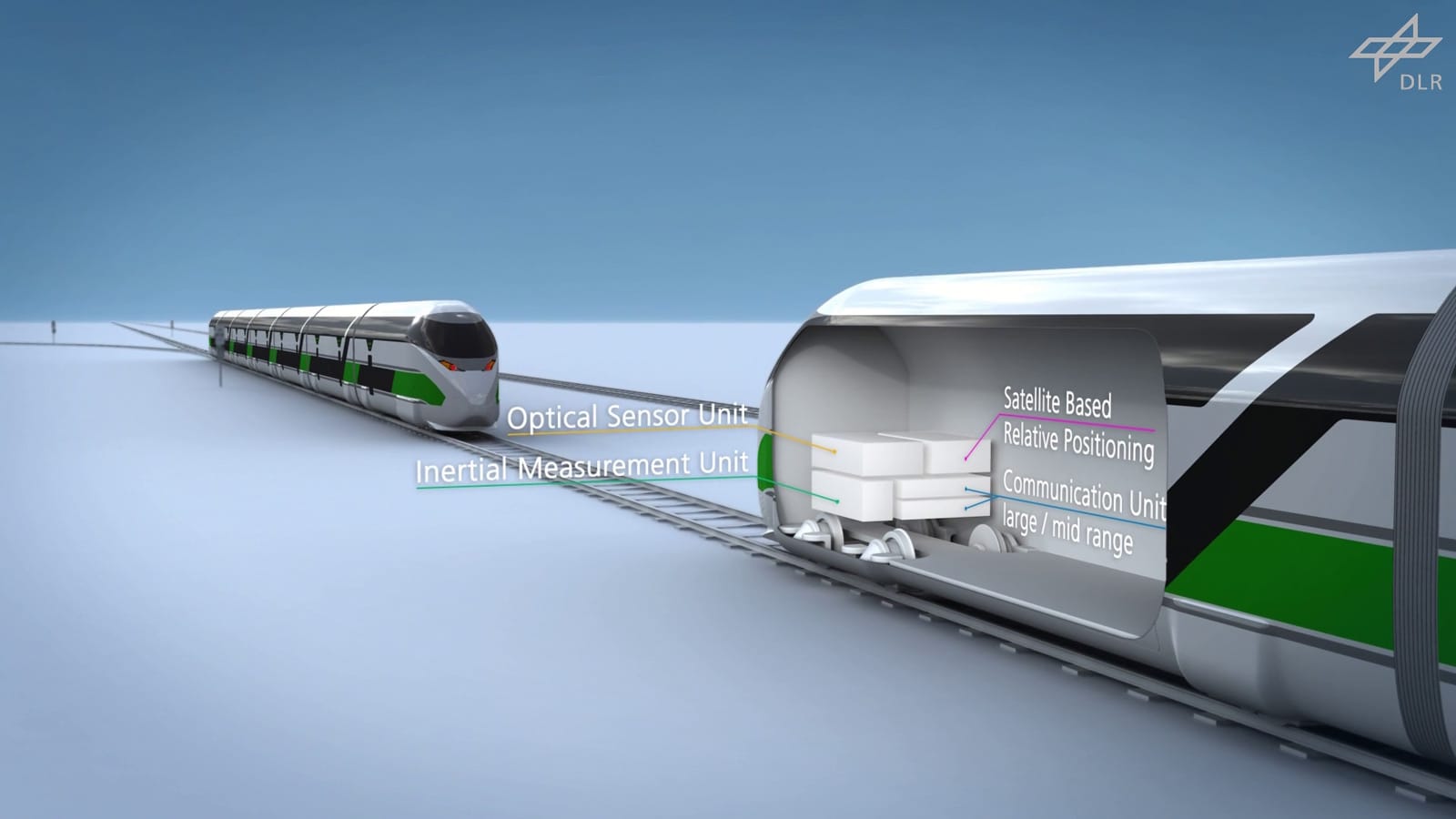
Die elektronische Kupplung besteht im Wesentlichen aus Sensoren zur Messung der absoluten und relativen Positionen, Geschwindigkeiten und Beschleunigungen sowie einer drahtlosen Datenübertragung. Diese wurde bereits in 2016 im EU-Projekt Roll2Rail vom DLR zusammen mit der italienischen Trenitalia bei Relativgeschwindigkeiten bis zu 500 km/h untersucht. Darüber hinaus wird eine digitale Streckenkarte benötigt, um die Position auf dem Gleis und den Abstand zwischen den Zügen bestimmen zu können. Dem Fahrregler des Führungsfahrzeuges ist eine Abstandsregelung der Nachfolgerfahrzeuge unterlegt. Der schwerste Nachfolger mit der geringsten Bremskraft bestimmt dabei den Bremsweg des Zugverbandes. Eine solche Abstandsregelung wurde in den letzten Jahren beim DLR entwickelt. Der mögliche und optimale Abstand im Zugverband ist derzeit ebenfalls Gegenstand der wissenschaftlichen Untersuchungen am DLR.